
Махи ногой на нижнем блоке
6 минут на освоение. 345 просмотров
AtletIQ — приложение для бодибилдинга
600 упражнений, более 100 программ тренировок на массу, силу, рельеф для дома и тренажерного зала. Это фитнес-револиция!
Общая информация
Тип усилия
ДругоеЖимНетСтатическиеТяга
Вид упражнения
СиловоеРастяжкаКардиоПлиометрическоеStrongmanКроссфитПауэрлифтингТяжелая атлетикаСтрейчингово-силовое упражнениеЙогаДыханиеКалланетика
Тип упражнения
БазовоеИзолирующееНет
Сложность
НачинающийПрофессионалСредний
Целевые мышцы
Вспомогательные мышцы
Бедра
Махи ногой на нижнем блоке видео
Как делать упражнение
- Прикрепите кожаную манжету для лодыжки на низкий блок, а затем наденьте манжету на лодыжку.
- Встаньте лицом к весам на расстоянии примерно 50-60 см, возьмитесь за стальной каркас для поддержки.
- Слегка согните колени и бедра, напрягите мышцы живота, сожмите ягодичные мышцы, на выдохе медленно отведите рабочую ногу назад по полукруглой дуге так высоко, насколько это будет комфортно. Важно: При полном вытягивании ноги сожмите на секунду ягодичные мышцы, чтобы достичь пика сокращения.
- Теперь медленно верните рабочую ногу вперед, сопротивляясь тяге кабеля, пока не вернетесь в исходное положение.
- Выполните это упражнение необходимое количество раз.
- Поменяйте ноги и выполните это упражнение другой ногой.
Вариации: Вы можете выполнять это упражнение с использованием ленты для упражнений.
Фото с правильной техникой выполнения
Какие мышцы работают?
При соблюдении правильной техники выполнения упражнения «Махи ногой на нижнем блоке» работают следующие группы мышц: Ягодицы, а также задействуются вспомогательные мышцы: Бедра
Вес и количество повторений
Количество повторений и рабочий вес зависит от вашей цели и других параметров. Но общие рекомендации могут быть представлены в виде таблицы:
| Цель | Подходы | Повторений | Вес, %1Rm | Отдых м/у подходами |
|---|---|---|---|---|
| Развитие силы | 2-6 | 1-5 раз | 100-85% | 3-7 мин |
| Набор массы | 3-6 | 6-12 раз | 85-60% | 1-4 мин |
| Сушка, рельеф | 2-4 | 13-25 раз | 60-40% | 1-2 мин |
Сделать тренинг разнообразнее и эффективнее можно, если на каждой тренировке изменять количество повторений и вес снаряда. Важно при этом не выходить за определенные значения!
*Укажите вес снаряда и максимальное количество повторений, которое можете выполнить с этим весом.
Не хотите считать вручную? Установите приложение AtletIQ!
- Электронный дневник тренировок
- Помнит ваши рабочие веса
- Считает нагрузку под вас
- Контролирует время отдыха
Лучшие программы тренировок с этим упражнением
Среди программ тренировок, в которых используется упражнение «Махи ногой на нижнем блоке» одними из лучших по оценкам спортсменов являются эти программы:
Чем заменить?
Вы можете попробовать заменить упражнение «Махи ногой на нижнем блоке» одним из этих упражнений. Возможность замены определяется на основе задействуемых групп мышц.
Возможность замены определяется на основе задействуемых групп мышц.
Махи ногой на нижнем блоке Author: AtletIQ: on
ОТВЕДЕНИЕ НОГИ НАЗАД В ТРЕНАЖЕРЕ и НА СКАМЬЕ
Отведение ноги назад – это очень эффективное изолирующее упражнение, позволяющее нагрузить ягодичную мышцу отдельно от квадрицепса. Как правило, это упражнение используют девушки, поскольку гипертрофия ягодиц является задачей номер один именно для них. Редко встретишь, чтобы отведение ноги назад в тренажере выполняли мужчины, но это бывает необходимо во время проработки качества мышц, а так же в том случае, когда ягодицы воруют нагрузку у квадрицепсов во время выполнения базовых упражнений. Девушки тоже могут использовать отведение ног в качестве предварительного утомления, но с совершенно другими целями.
Отведение ног назад в тренажере лучше не ставить в начало тренировки, поскольку позитивная фаза упражнения выполняется в достаточно быстром темпе, что может негативно сказаться на состоянии ещё не разогретого тазобедренного сустава. Следует так же избегать различных рывков и разворота корпуса, упражнение следует выполнять исключительно за счет усилия целевых мышечных групп в спокойном темпе, что обеспечит подконтрольность движений. Существует несколько вариаций этого упражнения, для использования которых нужны разные тренажеры, а поскольку каждый тренажерный зал обладает своим инвентарем, мы предоставим информацию обо всех.
Работа мышц и суставов
В каком бы тренажере Вы ни выполняли отведение ноги назад, рабочие мышечные группы будут одни и те же, хотя, акцент нагрузки может смещаться. В любом случае, основными рабочими мышцами будут ягодицы и бицепс бедра, за счет которых и будет выполняться позитивная фаза упражнения. Остальные мышцы выполняют функцию стабилизаторов, и их участие зависит от положения корпуса во время выполнения упражнения.
Главным рабочим суставом является таз, хотя, коленный сустав, как уже отмечалось выше, так же частично берет на себя нагрузку в конечной фазе амплитуды движения. Отведение ноги назад в тренажере, тем ни менее, является изолирующим упражнением, поэтому подчеркиваем ещё раз, что коленный сустав участвует исключительно факультативно. Если Вы будете стараться осуществить усилие за счет разгибания колена, то сместите нагрузку в квадрицепс и упражнение просто потеряет свой смысл. Поэтому главной рекомендацией является использование такого рабочего веса, который Вы способны полностью контролировать. Лучше взять вес меньше и выполнить больше повторений, чем навешать непосильный вес и выполнять упражнение неправильно!
Отведение ноги назад в тренажере1) Не важно, выполняете Вы отведение ноги в кроссовере или специализированном тренажере, техника выполнения будет одинаковой, поэтому упритесь руками плотно в стойки кроссовера или тренажера и прогните спину в пояснице.
2) Рабочая нога в исходном положении немного приподнята вверх за счет согнутого коленного сустава, а свободная нога плотно упирается в пол, при этом, центр тяжести необходимо разместить в пятке.
3) Если упражнение выполняется в тренажере, то толкать плиту нужно пяткой, но отрывать носок нельзя, в кроссовере вес не толкают, а тянут, но пятку нужно выставить дальше носка, то есть, стопа немного согнута.
5) Немного задержав положение ноги в точке пикового сокращения целевых мышечных групп, медленно и подконтрольно верните ногу в исходное положение.Отведение ноги назад на скамье
1) В исходном положении спина должна быть прогнута, голова смотрит вперед, руками необходимо плотно держаться за скамейку, свободная нога в согнутом положении находится на лавке, а рабочая нога, с согнутым на 90° коленным суставом, находится на уровне скамьи.
2) Дышать следует ровно, точно так же, как и в предыдущем варианте, выдох на усилии, а вдох во время негативной фазы, то есть, при опускании ноги в исходное положение.
3) Вначале амплитуды движения ногу следует отводить назад и вверх опять-таки за счет работы тазобедренного сустава, а коленный сустав включается уже во второй фазе амплитуды.
5) Из точки пикового сокращения целевых мышечных групп медленно и подконтрольно, на выдохе, верните ногу в исходное положение.Анатомия
Нижняя часть тела представлена несколькими большими мышечными массивами, которые можно поделить на трехглавую мышцу голени, переднюю часть бедра, заднюю часть бедра и ягодичные мышцы. Отведение ног назад тренирует заднюю поверхность бедра и ягодицы, что принципиально важно для девушек, поскольку гипертрофия этих мышц делает женскую фигуру более сексуальной.
В тоже время, отведение ног назад в тренажере может быть полезно и мужчинам, поскольку упражнение растягивает мышцы, что в последствие приводит к ускорению их гипертрофии. Но, если девушки могут использовать это упражнение в качестве основного, то для мужчин оно исключительно факультативно. Ещё раз подчеркиваем основные моменты: спина обязательно прогнута, голова смотрит вперед, активная фаза упражнения осуществляется за счет работы бицепса бедра и ягодичных мышц, пятка всегда впереди носка, коленный сустав работает только в конечной фазе амплитуды движения. Соблюдайте эти простые правила, и Вы обязательно накачаете такие ягодицы, о которых всегда мечтали!
Упражнения для бодибилдинга
Махи ногами стоя Multi hip 1FE090 Panatta
В отличии от большинства тренажеров, представленных на сегодняшний день на рынке, тренажеры Panatta полностью производятся в Италии. Тренажеры изготавливается под заказ по индивидуальному запросу.
Многофункциональный тренажер для развития мышц бедра и ягодичных мышц. Тренируемые мышцы – приводящие мышцы бедра, отводящие мышцы бедра (напрягатель широкой фасции), мышцы задней поверхности бедра (бицепс бедра), ягодичные мышцы, разгибатель спины. Выполняемые упражнения – махи (отведение или приведение) одной ноги в сторону или назад в положении стоя. Тренажер позволяет выполнять множество различных махов на различные мышцы бедра. Также можно выполнять махи ногами вперед.Функция Range of motion — регулировка начального угла делает тренажер высококомфортным, способствует максимальной эффективности во время тренировки. Такая регулировка осуществляется легко – с помощью рычага-фиксатора, расположенного вверху поворотного узла. Нагрузка регулируется выбором желаемого числа грузов в блоке с помощью шпильки-фиксатора. Тренажер представляет собой сварную раму, на которой установлены следующие основные узлы:
Такая регулировка осуществляется легко – с помощью рычага-фиксатора, расположенного вверху поворотного узла. Нагрузка регулируется выбором желаемого числа грузов в блоке с помощью шпильки-фиксатора. Тренажер представляет собой сварную раму, на которой установлены следующие основные узлы:
– направляющие с блоком грузов;
– два горизонтальных поручня с широкими опорными ручками;
– широкая регулируемая опорная платформа;
— центральная каретка, регулируемая по высоте: 5 положений.
Грузоблок стандартным весом 50 кг с шагом 5 кг полностью закрыт поликарбонатной защитой.
Гарантия:
-на компоненты и механизмы 24 (Двадцать четыре) месяца;
-на раму 120 (Сто двадцать) месяцев;
-на краску и хромированные части 12 (Двенадцать) месяцев.
Возможно заказать цвет рамы из 6 различных цветов. Цвета рамы представлены на фото.
В стандартном исполнении обивку мягких частей тренажера можно выбрать из 8 различных цветов. Цвета обивки представлены на фото.
В эксклюзивном исполнении возможно выполнить персонализированную обивку, с контрастным кантом.
По желанию заказчика, на обивке тренажеров можно вышить логотип компании или фитнес клуба с индивидуальным дизайном. Возможные варианты брендирования представлены на фото.
Махи ногой назад в кроссовере,махи ногами для ягодиц
- Подробности
- Просмотров: 4670
Отведение ноги назад в тренажере — это упражнение дает возможность эффективно
Отведение ноги назад с нижнего блока кроссовера относится к классу изолирующих упражнений.
- Большая ягодичная мышца
- Мышцы задней поверхности бедра
- Разгибатели позвоночника, косые мышцы живота, малая и средняя ягодичная мышцы, квадратная мышца поясницы
- Прямая мышца живота
- Общая подтянутость, мышечный тонус и возможность сделать ноги стройнее
- Улучшение формы ягодиц
- Возможность приподнять ягодицы
- Воздействие на конкретную часть ягодиц
- Проработка ягодичных мышц при невозможности выполнения базовых упражнений
1. Подойдите к нижнему блоку кроссовера и закрепите покрепче манжету на лодыжке. Возьмитесь руками за выступающие ручки тренажера и напрягите ягодицы
Подойдите к нижнему блоку кроссовера и закрепите покрепче манжету на лодыжке. Возьмитесь руками за выступающие ручки тренажера и напрягите ягодицы
2. Вдохните, и, на выдохе, мощным усилием правой ягодицы отведите ногу назад настолько высоко, как сможете. В конечной точке траектории задержитесь на 1-2 секунды и произведите пиковое мышечное сокращение. Медленно и подконтрольно вернитесь в исходное положение. Смените ногу и проделайте также и с ней. Повторите заданное количество раз
Альтернативные упражнения:
Помимо классического варианта существуют так же альтернативные упражнения:
- Отведение с упором о скамью
- Отведение из положения лежа на фитболе
- Отведение из положения стоя на четвереньках с эластичной резинкой
- Максимально отводите ногу назад, при этом она должна быть максимально выпрямленной
- Не берите большой вес
- Каждое повторение должно выполняться с усилием
- В верхней точке траектории задержитесь на 1-2 секунды и произведите пиковое мышечное сокращение
- Используйте упражнение в конце тренировки ягодиц, как добивающее
- Выполняйте движение плавно и не дергайте трос
- Техника дыхания: выдох — на усилие, отведение ноги назад; вдох – при приставлении ноги
- Численные параметры тренировки: количество подходов 3-5, повторений 10-15
Махи ногами назад, упражнение для ягодиц, видео:
Добавить комментарий
Манжеты для ног-какие выбрать
11/28/2020
Покупатель Русспорт.рф Главный
Манжеты для ног, обычно используются для работы с тренажерами типа «кроссовер», оборудованным нижним блоком. Или в домашних условия с набором резиновых эспандеров.
Манжеты для ног, представляют из себя,небольшой ремень шириной от 80 до 100мм. выполненный:
из плотного материала -Ткань «Оксфорд»
синтетического материала — Неопрен
https://russport.su/manzhety/manzheta-dlya-tyagi-neoprenovaya-f-15/
или натуральной кожи.
Крепление манжеты к тяге
- Манжеты оборудованы металлическим кольцом за которое манжета крепится к тросу кроссовера при помощи стального карабина.

Разновидности застежек и нагрузка на разные виды манжет.
- Вокруг лодыжки манжета фиксируется с помощью застежек: пряжки, липучки или стальных колец.
- Застежки типа липучка или стальные кольца, более удобны в использовании, поскольку позволяет быстрее надевать и снимать манжету. Они подойдут Вам, если вам нужны манжеты расчитаные на нагрузку до 40 кг
- Застежки «пряжка» используются в более дорогих манжетах выполненных из натуральной кожи предназначеных для нагрузок до 90кг.
Удобство и комфорт.
- Для удобства использования внутри манжеты обычно проложен смягчающий материал.
- В более дешевых моделях внутри манжета выполнена из того же материала что и наружная часть.
- В более дорогих моделях внутренняя часть изготовлена из спилка кожи — натурального и гипоалергенного материала.
Итог:
Вы прочитали нашу статью о манжетах для тяги. В ней мы постарались рассказать о всех видах манжет.
Теперь выбор за Вами. В нашем магазине вы можете выбрать манжеты, от дешевых стомостью 350руб за штуку или кожанные по цене от 800 руб за1 штуку. Все модели манжет произведены в России компанией ONHILLSPORT., Которая предоставляет гарантию 12 месяцев, на всю свою продукцию. И бесплатный ремонт изделий до полного износа.
Выбор за ВАМИ. Желаем вам удачных покупок.
Махи ногами для ягодиц: техника отведения, нюансы упражнения
Махи ногами – это ритмичные движения ими по очереди с изменением привычного положения относительно туловища. Они бывают вперед, назад, в стороны, выполняются стоя, лежа, на четвереньках и с отягощением или на тренажерах. Используют кроссовер, «машину Смита», гантели, «ослик». Эту часть тренировки следует сделать замыкающей, после прыжков, приседаний, пробежки, тяги и жимов.
Но и тогда махи не помогут избавиться от лишнего веса, они лишь способствуют его снижению вместе с диетой и другими видами нагрузки. Ведь за минуту занятий сжигается лишь до 20 ккал. И только при регулярных тренировках с 3-мя подходами по 20-30 повторов.
И только при регулярных тренировках с 3-мя подходами по 20-30 повторов.
Махи ногами: основные знания
Махи прямыми или согнутыми в колене ногами нужно делать на каждом занятии, а не от случая к случаю. Необходимо следить, чтобы напрягались мышцы тренируемой области тела, а не спины, то есть контролировать осанку. Важно уделить внимание махам в стороны. Они нагружают средние ягодичные мышцы, чтобы эта зона была округлой. При таком варианте задействуют также приводящую и бедренную.
Но для пропорциональности фигуры не менее важно делать отведения назад и вперед. Махи полезны еще и тем, что помогают избавиться от целлюлита, «галифе» на бедрах, сделать ноги стройнее. Поэтому в тренировку следует включать ритмичные движения из положений стоя, лежа на боку, из позы кошки, с использованием утяжелителей, резинок на манжете, кроссовера.
Рекомендуем прочитать статью об упражнениях для похудения ног и ляшек. Из нее вы узнаете о правилах проведения тренировки, эффективных упражнений для выполнения стоя, лежа, как получить быстрый результат. А здесь подробнее об упражнениях со стулом для похудения.
А здесь подробнее об упражнениях со стулом для похудения.
Как правильно делать махи ногами
Правильно и эффективно делать махи ногами получится, если соблюдать несколько условий:
- Регулярность. Упражнения дают результат, но не сразу, а через 4-5 недель. Поэтому важно найти место махам в общем наборе занятий.
- Комплексность. Чтобы верхняя часть ног, ягодицы приобрели не только стройность, но и гармоничные очертания, важно выполнять разные виды упражнения – вперед, назад, в стороны. Это позволит мышцам равномерно подтянуться и укрепиться.
- Использование отягощения. Есть специальные накладки на щиколотки с разным весом. На первом этапе занятий можно обойтись без них, но позже стоит надевать утяжелители или фитнес-ленты.
- Следить за осанкой. Даже когда упражнения выполняются лежа на боку, нужно стараться сохранять спину прямой. Это сильнее нагрузит ягодичные мышцы и область бедер.
Махи в сторону ногами: какие мышцы работают
При выполнении махов в сторону ногами работают следующие мышцы:
- Средние ягодичные, когда происходит движение наружу.
 Этот вид техники полезен, потому что не позволяет попе стать квадратной.
Этот вид техники полезен, потому что не позволяет попе стать квадратной. - Приводящая, то есть расположенная на внутренней поверхности бедра, когда выполняется движение к другой ноге. Оно делает верхнюю часть стройнее и ровнее.
- Боковой зоны бедра. Она работает и при отведении ноги в сторону, и при движении ею внутрь. Это позволяет избавиться от «галифе».
- Мышцы поясницы. Особенно сильна нагрузка на них, если упражнение выполняется в положении лежа.
Виды упражнений
Махи выполняют в стороны, вперед, назад, из положения стоя, на четвереньках, а также лежа на боку и спине. На первом этапе, пока мышцы еще не готовы к серьезным нагрузкам, можно делать некоторые упражнения слегка согнутыми в коленях ногами. По мере укрепления следует контролировать, чтобы они были прямыми.
Махи в сторону
Движения ногами в сторону можно выполнять в нескольких вариантах:
| Позиция | Как выполнять |
| Стоя и держась за опору, которая находится впереди | Ногу ритмично отводят в бок так, чтобы между нею и второй нижней конечностью каждый раз получался тупой угол. То же можно делать, перемещая ее внутрь. То есть правая нога идет влево, а при их смене левая – вправо. То же можно делать, перемещая ее внутрь. То есть правая нога идет влево, а при их смене левая – вправо. |
| Из положения на четвереньках, ладони выпрямленных рук упираются в пол, колени также стоят на коврике | Спина во время выполнения упражнения должна быть ровной, без прогиба. В достаточно быстром темпе нужно отводить вверх-в сторону согнутую в колене ногу, опуская вниз не до конца. |
| Лежа на боку | Если работает левая нога, нужно устроиться на правом, эту же руку согнуть в локте и подложить под голову. Левой ладонью следует сохранять равновесие тела, поместив ее перед грудью на коврике. Прямую ногу следует ритмично отводить вверх-в сторону и опускать. |
| Из позы «планка» | Колено одной ноги подтягиваю к груди и возвращают в исходное положение. Потом их меняют. |
Лежа на боку
Из лежачего положения на боку выполняют движения в сторону следующим образом:
- устроиться на коврике в начальной позе;
- опорную ногу чуть согнуть в колене для большей устойчивости;
- можно поддерживать голову рукой, опершись локтем о коврик;
- вторую ногу поднимать вверх относительно пола и одновременно в бок.

Упражнение из того же положения можно разнообразить. Рабочая нога – та, что лежит на коврике, например, левая. Ее следует отводить внутрь, то есть в сторону второй нижней конечности. Правая же нога во время выполнения должна быть согнута в колене, чтобы ступней опираться о пол.
На четвереньках
Из позы на четвереньках можно выполнять два упражнения:
- Встать, сделав опорой локти и одно колено. То есть все делается через упор на согнутых руках. Вторую ногу следует вытянуть и поднимать медленно вверх, задержать там, затем опускать. Спину надо сохранять прямой и контролировать, чтобы нагрузка приходилась на ягодицы, а не поясницу.
- Исходное положение, как в предыдущем случае. Только поднимать вверх следует полусогнутую ногу. Затем возвращаются к прежнему положению.
Стоя
Из положения стоя выполняются движения ногами в стороны (внешнюю и внутреннюю), а также:
- Махи назад. Нужно, чтобы впереди была опора, за которую следует держаться рукой.
 Ногу следует максимально отвести назад множество раз до напряжения в мышцах.
Ногу следует максимально отвести назад множество раз до напряжения в мышцах. - Махи вперед. Здесь опора должна быть сбоку, чтобы не мешать основному движению. Ногу поднимают так, чтобы спина не прогибалась.
На спине
Лежа на спине для «шлифовки» внутренней поверхности бедер делают следующее:
- в исходном положении прямые ноги поднимают вверх почти под прямым углом к телу;
- одновременно максимально разводят их в стороны;
- медленно возвращают назад, приближая друг к другу.
Для большего эффекта это упражнение следует выполнять с утяжелителями. Из того же положения можно делать просто подъемы выпрямленных ног от пола и на максимально возможную высоту, ближе к телу. Но в этом случае нагрузка на мышцы будет щадящей.
Для больших ягодиц
Для больших ягодичных мышц, имеющих существенный объем, подойдет упражнение из положения на четвереньках. Опираться следует на ладони выпрямленных рук и колени. Одну ногу надо вытянуть «в струнку», одновременно отводя назад, вторая находится на полу согнутой. Каждой следует сделать 20-30 махов подряд. Затем ноги меняют.
Одну ногу надо вытянуть «в струнку», одновременно отводя назад, вторая находится на полу согнутой. Каждой следует сделать 20-30 махов подряд. Затем ноги меняют.
Для большего эффекта используют утяжелители. А еще можно сделать опорными не ладони, а локти, то есть согнуть руки. Тогда нижняя часть тела окажется ниже бедер, что тоже повысит нагрузку на ягодичные мышцы.
Махи назад можно делать и стоя поочередно каждой ногой. Чтобы усилить эффект, нужно использовать резинку или утяжелитель. Когда нога будет на максимально высокой точке, следует задержать ее в этом положении, только потом опускать.
Упражнения вызывают заметное напряжение большой ягодичной мышцы. Именно она составляет самую объемную долю этой области тела. Прокачивается также и задняя поверхность бедра.
Польза махов ногами для женщин
Польза махов ногами существует для всех женщин вне зависимости от веса и состоит в следующем:
- укрепление мышц ягодиц, подтяжка, значит, и улучшение формы этой области;
- усиление циркуляции крови в тренируемой зоне, то есть и избавление от целлюлита, выравнивание кожи;
- улучшение формы бедер, так как мышцы внутренней поверхности подтягиваются, укорачиваются, что способствует избавлению от небольшой кривизны в этой зоне;
- разгрузка суставов, так как крепкие мышцы способствуют снятию с них лишнего напряжения при движении.
Худеющим махи тоже добавят нагрузки, что благоприятно скажется на весе. Ведь для их выполнения прилагаются усилия, то есть происходит расходование энергии.
Сколько калорий сжигается
При выполнении разных вариантов упражнений сжигается от 4 до 20 калорий в минуту. Это зависит от интенсивности тренировки, количества подходов и числа махов ногами. Больше всего энергии тратится при выполнении упражнений из положения на четвереньках или «планки». Усиливают нагрузку использование утяжелителей и тросов.
Польза от выполнения упражнения для ягодиц
Помогают ли махи похудеть ногам? Косвенно — да, как и абсолютно любая активность, включая прогулки, занятия любовь и даже ковыряние в носу, если это помогает вам создать дефицит калорий
Прямая правая нога в качелях для гольфа (правильно или неправильно?) — Golf Journey 365
Инструкция по игре в гольф может сбивать с толку. Мы понимаем вашу боль и разочарование из-за множества разных советов, которые вы часто слышите или получаете!
Здесь, в golfjourney365, мы пытаемся дать представление о многих общих советах по игре в гольф на протяжении многих лет.
Я понимаю, что советы по гольфу могут часто отличаться от одного инструктора к другому. Здесь я пытаюсь показать вам преимущества каждого движения, которое часто рекомендуется.
Сегодня я ныряю в подход с прямой правой ногой в замахе гольфа.
В последнее время много времени уделяется ногам в качелях для гольфа.
В последнее десятилетие мы наблюдали увеличение дистанции в туре, которое было весьма впечатляющим, и многие инструкторы по гольфу отдают должное использованию ног и наземных сил для достижения большей скорости, что приводит к более длительным поездкам с повышенной скоростью.
Каждый игрок в гольф хочет большей скорости и большей дистанции, в результате чего клюшки становятся короче, что дает нам более короткие патты и больше шансов сделать патт.
Аналитика расстояния не обманчива, расстояние жизненно важно, поэтому важно понимать преимущества прямой правой ноги в гольфе.
У качелей для гольфа есть много возможных вариаций, ознакомьтесь с преимуществами прямой правой ноги ниже. Следует ли использовать прямую правую ногу в качелях для гольфа?
Следует ли использовать прямую правую ногу в качелях для гольфа? Да, прямая правая нога при замахе в гольфе, особенно в верхней части замаха в гольфе, может обеспечить значительное увеличение способности поворачиваться и увеличить диапазон движений при замахе назад, что может привести к дополнительной скорости при замахе вниз .
Я бы порекомендовал этот подход в качелях для гольфа и сказал, что это правильный способ качания, основанный на приведенных ниже преимуществах.
Учения прошлого — неправильный подход!Я считаю, что мы отошли от подхода X Factor к раскачиванию клюшкой, когда плечи поворачиваются, но нижняя часть тела остается стабильной благодаря мыслительному процессу создания большего сопротивления в махе спиной для увеличения скорости.
Правое колено было рекомендовано оставаться согнутым, чтобы гольфист мог оттолкнуться от этой ноги.Я считаю, что это может быть сложно для спины, и время требует много повторений.
5 преимуществ прямой правой ноги в качелях для гольфа:
- Увеличение поворота бедра
- Увеличение поворота плеча
- Увеличение скорости поворота
- Повышение способности свободно качаться без ограничений
- Повышение способности использовать наземные силы
В каждом разделе я буду выделять бывший метод, основанный на X-факторе, а затем поговорим о новом обучении.Большая часть нового обучения на самом деле основана на изучении ударов величайших игроков в гольф всех времен, включая: Бена Хогана, Сэма Снида, Джека Никлауса и Бобби Джонса.
Когда многие люди начали изучать эти качели, они заметили более свободный ход, с прямым правым коленом в верхней части замаха с большим количеством вращений в бедрах и плечах!
Мои любимые инструкторы по гольфу, включая Шона Клемента, Майка Маласка, Джорджа Ганкаса и инструкторов Stack and Tilt, — все они способствуют свободному плавному полному повороту в обратном замахе, чтобы дать волю течению и максимально увеличить скорость и расстояние!
Преимущество № 1: Увеличение вращения бедра При колебании X-фактора игрок в гольф ограничивает движение бедер. Я помню, как привязался к свингу вот так и изо всех сил пытался вызвать скорость или поддержку.
Я помню, как привязался к свингу вот так и изо всех сил пытался вызвать скорость или поддержку.
Как только я открыл для себя методы обучения и преподавания Stack and Tilt, я осознал важность качественного поворота бедра. Копировать качание стало намного проще, а сжатие мяча значительно увеличилось!
Выпрямление правой ноги в махе назад позволяет бедрам полностью вращаться и генерировать скорость в махе вниз. Раньше требовалась большая гибкость, чтобы завершить поворот с подходом X-фактора, но теперь гольфист может получить полный поворот независимо от мобильности!
Этот свободный подход и полный поворот вспять можно увидеть в величайшем из всех времен.
Посмотрите поворот бедра Бена Хогана ниже:
Преимущество № 2: Увеличение поворота плеча В предыдущем методе гольфист пытался повернуть плечо напротив бедер. Как обсуждалось ранее, для успешного завершения этого требовалось много гибкости и силы ядра.
Игрок в гольф пытается перевернуть согнутую заднюю ногу и перекинуть переднее плечо через заднюю ногу. Больно даже думать об этом шаге! И тогда гольфист каким-то образом собирался сделать атлетический ход из этой позиции?
Вау, я бы хотел знать об замечательных учителях, упомянутых ранее, примерно 5-10 лет назад!
Вместо этого, выпрямляя правую ногу, гольфист может повернуть плечи и бедра за мячом.Чтобы сделать «новый» ход, больше не требуется невероятной гибкости или силы ядра. C
Посмотрите это видео Сэма Снида, чтобы понять полный поворот в замахе как кончиками, так и плечами:
Следует отметить движение передней ноги. Наблюдайте, как сгибается левая или передняя нога в махе назад. Это может создать невероятную скорость, когда ноги работают вместе, как это делает мистер Снид. Поистине качели, которые можно воспроизвести, даже если это просто полный поворот и плавность хода!
Преимущество № 3: Увеличение скорости поворота Свинг X Factor имел правильные намерения и в то время имел смысл. Ограничение нижней частью тела помогло бы плечам быстро раскачиваться, и тогда руки и булава пролетели бы через зону удара.
Ограничение нижней частью тела помогло бы плечам быстро раскачиваться, и тогда руки и булава пролетели бы через зону удара.
Если бы вы были достаточно гибкими, чтобы это произошло, вы могли бы отлично замахнуться с впечатляющей скоростью. Однако для большинства гольфистов это было непросто.
Выполняя полный поворот и выпрямляя правую ногу, вы создаете пространство. Это пространство дает возможность развивать скорость. Без полного поворота игрок в гольф ограничивает свою способность развивать скорость, просто сокращая время, необходимое гравитации!
Есть много способов создать скорость, но все начинается полным ходом.Я также настоятельно рекомендую тренироваться на скорость с помощью системы обучения гольфу SuperSpeed. Эта система может помочь вам увидеть увеличение скорости поворота на 5-8% уже на первой тренировке.
Ознакомьтесь с нашим полным обзором SuperSpeed Golf здесь.
Проверьте Brandel Chamblee, поговорите о полном повороте и используйте место:
Преимущество № 4: Повышение способности свободно качаться без ограничений X Factor заставлял игроков в гольф пытаться занять определенные позиции и думать о перемещении частей тела здесь или о сохранении некоторых других частей на месте. Это может привести к нетребовательному замаху.
Это может привести к нетребовательному замаху.
Современные высококлассные инструкторы, такие как Майк Маласка и Шон Клемент, позволяют вам делать спортивные движения с мячом. Без ограничений и беспокойства о положении рук, плеч или бедер в определенных местах.
Вместо этого вы делаете полный ход с полным разворотом назад и вперед и беспокоитесь о своей цели или управляете движением клюшки. Это свободное плавное движение, которое позволяет вашим спортивным способностям взять верх.
Подход Брандела Шамбле к игре в гольф основан на исследованиях движений величайших гольфистов всех времен. Он использовал этот подход для свинга своей клюшки, но когда он участвовал в PGA Tour, он превратился в свинг типа X Factor.
Подход со свободным махом помогает вам использовать имеющиеся у вас спортивные способности и максимально увеличить дистанцию!
Вот видео, на котором Шон Клемент обсуждает новый подход к обучению:
Преимущество № 5: Повышение способности использовать наземные силы
В предыдущем подходе к гольфу игрок в гольф имел две согнутые ноги. Из этого положения сложно получить качественный толчок от земли, так как ноги уже согнуты. На секунду представьте себе баскетболиста: он начинает с прямых ног, опускается до гибкого положения, а затем подпрыгивает при прыжке или стрельбе.
Из этого положения сложно получить качественный толчок от земли, так как ноги уже согнуты. На секунду представьте себе баскетболиста: он начинает с прямых ног, опускается до гибкого положения, а затем подпрыгивает при прыжке или стрельбе.
Качели для гольфа похожи. Вы можете растягиваться в махе назад, сгибаться в начале маха вниз и использовать эти силы для подпрыгивания, что приводит к впечатляющей скорости. Посмотрите видео Сэма Снида ниже, чтобы узнать о легком приседании, которое происходит в начале даунсвинга.
В то время как правое колено выпрямляется в конце маха вниз, оно сгибается в начале маха вниз. Вы можете попрактиковаться в этом, взяв корзину для тренировочного диапазона, поместив ее между бедрами и уронив в начале маха вниз.
Это поможет вам активировать наземные силы, а также выпрямить и согнуть колени для максимальной скорости!
Приседания Сэма Снида:
Последние мысли: прямая правая нога в замахе в гольф (правильно или неправильно?) Хотя в замахе гольфа не обязательно есть правильные или неправильные движения, момент истины в конечном итоге — это то, что происходит при ударе. Как мы видели в нашем посте о самых странных колебаниях всех времен, существует множество различных способов оказать влияние. Есть движения, которые подходят большему количеству игроков в гольф.
Как мы видели в нашем посте о самых странных колебаниях всех времен, существует множество различных способов оказать влияние. Есть движения, которые подходят большему количеству игроков в гольф.
Хотел бы я лучше понимать эти движения в юношеской игровой карьере. Сегодня нам повезло, что у нас есть потрясающий доступ к лучшим инструкторам в мире, и мы приложили много усилий, чтобы изучить величайшие качели всех времен и по-настоящему понять, что происходит!
Для большинства любителей свободный плавный замах с прямой правой ногой в верхней части замаха даст вам перечисленные выше преимущества.
Обязательно посмотрите видео выше, чтобы расширить свои познания в игре и SuperSpeed Golf, если вам нужна дополнительная дистанция. Вот несколько отличных онлайн-инструкторов, которых мы настоятельно рекомендуем:
Лучшие онлайн-инструкторы по гольфу — 5 лучших
Мой секрет улучшения гольфа Давайте посмотрим правде в глаза, чтобы по-настоящему хорошо играть в гольф, мы должны часто тренироваться. Около трех лет назад я сделал рывок и вложился в симулятор гольфа для своего гаража.
Около трех лет назад я сделал рывок и вложился в симулятор гольфа для своего гаража.
Я использовал SkyTrak Launch Monitor и программное обеспечение TGC и теперь могу пройти более 100 000 курсов, включая Augusta, Pebble Beach, Bethpage Black, Whistling Straits. Сент-Эндрюс и многие другие из 100 лучших курсов в мире.
Этот симулятор гольфа, более доступный по цене, чем вы можете себе представить, полностью изменил правила игры. Теперь я могу играть в гольф каждый день в году, независимо от дождя, снега, холода или времени суток. Я могу тренироваться или играть в гольф.Я могу стоять на 11-м фервее в Огасте, и с функцией автоматической перемотки я могу практиковать свои удары при заходе на посадку с разных сторон.
Стоит проверить через Rain или Shine Golf, поскольку они предлагают невероятные пакеты вместе с предложениями финансирования, которые трудно превзойти.
Некоторые прямые ссылки на Rain or Shine Golf для получения информации о ценах и финансировании:
Так много часов с пакетом SkyTrak от Rain или Shine Golf! Еще одна вещь, которая помогла мне преодолеть значительную дистанцию, — это система тренировки SuperSpeed. Эта система, основанная на превышении скорости, при которой вы тренируетесь через день в течение примерно 10-15 минут с разными палками для поворота, может помочь вам увеличить скорость поворота на 5-8%, что может составлять 20-30 ярдов. Кому не нужны лишние 20-30 ярдов. Кроме того, это помогает улучшить вашу механику.
Эта система, основанная на превышении скорости, при которой вы тренируетесь через день в течение примерно 10-15 минут с разными палками для поворота, может помочь вам увеличить скорость поворота на 5-8%, что может составлять 20-30 ярдов. Кому не нужны лишние 20-30 ярдов. Кроме того, это помогает улучшить вашу механику.
SuperSpeed Golf — Используйте код скидки Golfjourney365, чтобы сэкономить!
Примите меры — что вы можете сделать сегодня, чтобы стать лучшеЧто это значит для вас? Я верю в следующий рецепт, чтобы поправиться:
1 — Улучшите свои движения при игре в гольф с помощью инструктора по гольфу.Вот несколько вариантов:Вот список инструкторов по гольфу, которых мы рассмотрели:
2 — Тренируйтесь быстрее качаться и улучшайте скорость поворота. Вот несколько вариантов:Хотите получить больше скорости и расстояния в замахе. Два варианта:
3 — Поймите стратегию курса и работайте, чтобы преодолеть следующий барьер. Вот серия о прорыве:
Вот серия о прорыве: Мы предоставили руководства о том, как сломать 100, 90, 80 и 70.Если интересно, ознакомьтесь с подробностями ниже.
4 — Практикуйтесь частоЗнаете ли вы, что я построил симулятор гольфа в своем гараже и сыграл более 500 раундов в гольф на своей системе SkyTrak? Это изменило правила игры, и стоит попробовать. Вот некоторые из моих других сообщений о гольф-симуляторах, часто задаваемые вопросы:
Все дело в бедрах: как сохранить свободу в гольф этой зимой
Игрок в гольф играет в виртуальный раунд гольфа на новом внутреннем симуляторе Incline Village Golf Courses, расположенном в Golf Shot в Chateau at Incline Village.Предоставлено IVGID |
Гольф-сезон здесь, на озере Тахо, как правило, довольно короткий. Местные курсы открываются в конце мая или в начале июня, и в эти первые месяцы ваши колебания будут немного скучными.
Обычно вы тратите пару месяцев на его настройку, и к тому времени, когда он снова становится нормальным и хорошим, уже июль, и осталось всего два месяца, чтобы пожинать плоды.
Ваш удар в гольф — это все о мышечной памяти, и когда эти мышцы не используются в течение семи месяцев, они, как правило, забывают о чем-то.Поэтому важно растягиваться и тренироваться всю зиму.
Потратьте некоторое время на растяжку сгибателей бедра не менее трех раз в неделю. Зимой сгибатели бедра имеют тенденцию напрягаться и могут действительно ограничивать способность гольфиста делать отличный поворот верхней части тела.
Отличный способ растянуть бедра — это лечь на спину с вытянутыми ногами, затем поднести одно колено к груди, оставив вторую ногу как можно более прямой и как можно ближе к земле.Удерживайте не менее 30 секунд, а затем переключитесь. Поочередно выполняйте каждую ногу по 5 раз.
Еще один отличный способ укрепить и расслабить сгибатели бедра — это делать выпады. Встаньте, поставив ступни близко друг к другу, затем сделайте шаг вперед одной ногой, пока ваша ведущая голень не окажется вертикально полу, а ведущее колено не окажется над опущенным пальцем.
Задняя нога должна сгибаться в колене, почти касаясь пола. Оказавшись в положении, вернитесь в исходное положение, поставив ноги вместе.Выполните не менее 10 повторений с каждой стороны. В дни, когда вы не занимаетесь растяжкой, также очень важно выполнять тренировочные качели.
И отличный способ сделать это — приехать попрактиковаться и поиграть на новом симуляторе гольфа, расположенном в магазине для гольфа на чемпионате Incline Village Championship Course.
В симуляторе Flight Scope используется трехмерный доплеровский радар для захвата всех компонентов вашего удара в гольф и траектории / полета мяча. Он может измерять скорость поворота, углы лица, траекторию поворота, углы атаки, расстояние в ярдах, скорость мяча, полет мяча и многое другое.
Я рекомендую вам проводить некоторое время в режиме тренировки на тренировочном поле каждую неделю, ударяя по крайней мере 10-20 мячей каждым утюгом, начиная с вашего самого высокого поднятого клина, затем 9 айроном, 8 айроном и т. Д., Пока вы не переместитесь полностью к Водитель. Это отличный способ сохранить ваши размеры в ярдах и расслабить мышцы.
Д., Пока вы не переместитесь полностью к Водитель. Это отличный способ сохранить ваши размеры в ярдах и расслабить мышцы.
Когда вы закончите, выберите одно из 18 различных полей для гольфа и сыграйте виртуальный раунд, чтобы сохранить остроту своей умственной игры.
Виртуальный раунд — отличный вариант, потому что он требует, чтобы вы играли разные удары и продумывали свой выбор клуба, а программное обеспечение действительно отлично справляется с имитацией реального раунда.
Чтобы сделать еще один шаг вперед, организуйте межсезонную тренировку вчетвером и добавьте дружеское соревнование в свой режим обслуживания зимних качелей.
Первое время на симуляторе можно зарезервировать, позвонив в магазин гольфа по телефону 775-832-1146. Вместо того, чтобы сидеть и ждать, пока откроются курсы, держите свои навыки и игру свежими, чтобы быть готовыми, когда местные курсы откроются.
Робин Брэдфорд — главный профессионал в области гольфа в Incline Village Mountain Course.
Как увеличить силу удара в футболе
В тактической, но мало результативной игре, такой как футбол, вы должны учитывать каждый удар. Возможности для достижения целей появляются нечасто. Слабый удар по мячу упрощает реакцию вратаря, снижает вероятность ошибки и повышает вероятность того, что вы упустите эту возможность.
Если вы хотите стать следующей звездой, то в первую очередь нужно начать наращивать силу удара. Выйдите на поле или воспользуйтесь мультиспортивным симулятором и отбейте мяч чисто и мощно с помощью этих советов.
Позиционирование
Как и практически в любом другом виде спорта с мячом, чистая мускульная сила не поможет вам достичь большего. Вам также нужно, чтобы физика работала в вашу пользу, правильно ударяла по мячу и как можно более эффективно передавала силу. Для этого вам нужно находиться в правильном положении, когда вы касаетесь футбольного мяча.
Убедитесь, что у вас достаточно разбега, чтобы вы могли набрать силу до того, как ваши ноги начнут махать.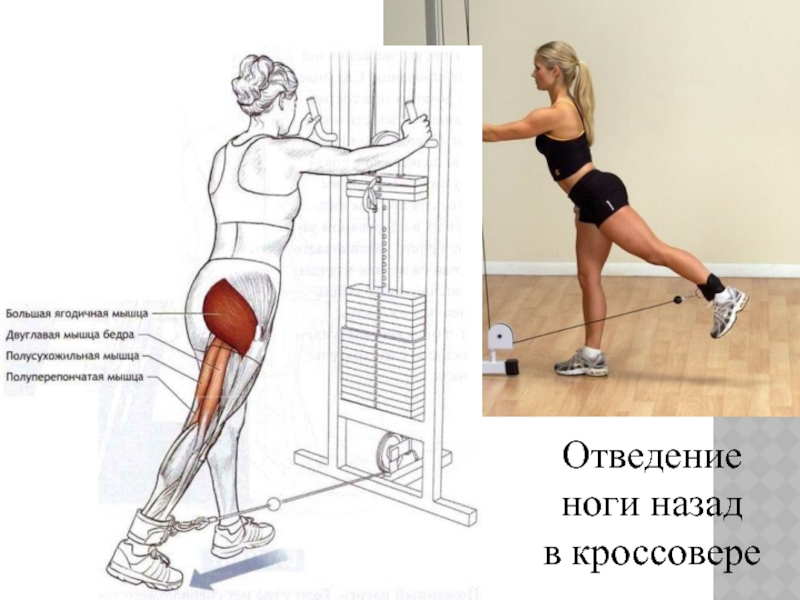 Если мяч оказался у ваших ног, ведите его еще на несколько футов, чтобы освободить себе место.
Если мяч оказался у ваших ног, ведите его еще на несколько футов, чтобы освободить себе место.
Вы хотите, чтобы при ударе ногой по мячу вы опирались на него, чтобы получить максимальное усилие. Это означает, что когда вы вступаете в контакт, ваша нога, не выполняющая удар, должна находиться примерно в полутора футах от стороны мяча, а не перед ним или за ним.
Угол, под которым вы приближаетесь к мячу, также важен, так как вы получите больше мощности, когда ваша нога сможет сделать полную дугу. Это означает, что вы будете заходить слева от мяча, если вы играете правой ногой, и справа, если вы бьете левой ногой.
The Kick
Вот момент истины. Опять же, чистый, несложный удар — ключ к эффективной передаче силы. Обязательно выполняйте эти шаги снова и снова, пока не сможете делать это, не задумываясь!
- Расслабьте любое напряжение в верхней части тела и ногах, которое может спровоцировать судороги и привести к неточному удару ногой.

- Делайте короткие шаги к мячу.
- Закончите финиш длинным шагом, чтобы не нанести удар ногой по мячу, как описано выше, при этом стопа должна указывать в том направлении, куда вы хотите, чтобы мяч шел.
- Держа голову над мячом, слегка согните ногу, не наносящую ударов, в коленях, а другую ногу полностью отведите назад.
- Зафиксируйте лодыжку, направив пальцы ноги ногой на землю.
- Проведите ногой.
- Цельтесь, чтобы попасть по мячу на полпути, прямо по суставу большого пальца ноги (но не по пальцам).
- Когда вы бьете по мячу, вытягивайте ногу щелчком для дополнительной силы.
- Держите голову над мячом, чтобы не откидываться назад и не поднимать его вверх.
- Обязательно разверните ногу по полной дуге.
Как правильно тренироваться
Хотя большая часть вашей силы будет исходить от использования правильной техники, нет сомнений в том, что выполнение некоторых силовых упражнений также поможет хорошо ударить по мячу.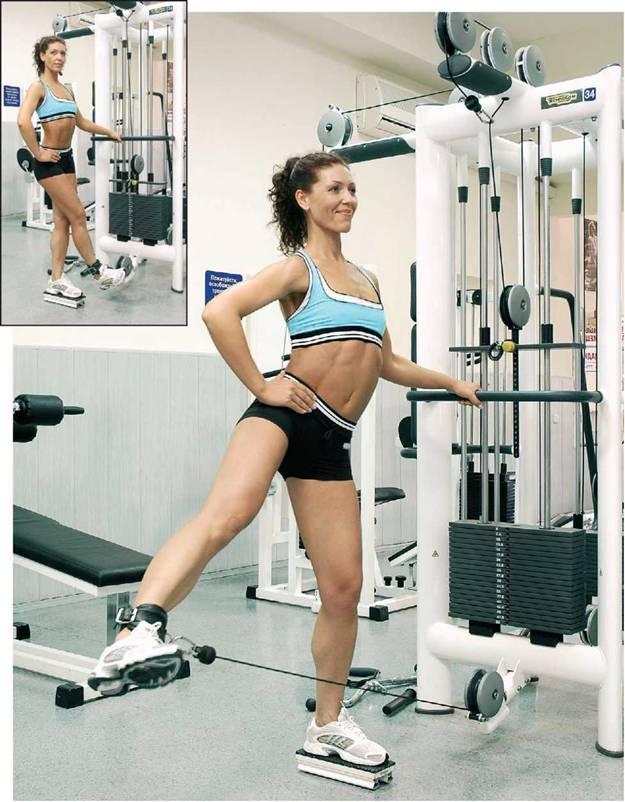 Спринты, приседания, выпады и работа с отягощениями будут способствовать увеличению мышц и увеличению силы после каждого удара.
Спринты, приседания, выпады и работа с отягощениями будут способствовать увеличению мышц и увеличению силы после каждого удара.
Конечно, само собой разумеется, что вы также должны совершать регулярные и частые занятия, и особенно полезно получать обратную связь.Один из способов — наблюдать за профессиональными футболистами и сравнивать свои действия с их действиями, но еще лучший способ — это мультиспортивный симулятор.
Интерактивные футбольные симуляторы не только предоставляют фантастический способ предоставить высокоточные данные о вашем ударе и составить график вашего прогресса, но и в высококачественных спортивных симуляторах также есть тренировочные режимы, футбольные матчи и упражнения, которые являются отличным способом поддерживать мотивацию . Лучше всего то, что когда вы наносите мощный мощный удар, вам не нужно далеко ходить, чтобы вернуть мяч!
Чтобы узнать больше о том, как Foresight Sports может помочь улучшить ваши футбольные навыки, свяжитесь с нами онлайн или позвоните нам по телефону (858) 880-0179 сегодня!
Подход двуногого робота к перемещению с использованием пассивного колеса без поворотной ноги на основе функций максимизации запаса устойчивости и предотвращения падений | ROBOMECH Journal
В этом разделе мы описываем планирование оптимизации, как спроецировать центр тяжести двуногого робота на опорный многоугольник, расширенный с помощью пассивного колеса.
Определения В общем случае, когда существует центр тяжести проекции точки робота в опорном полигоне, робот статически стабильный. Здесь точка проекции центра тяжести — это фут перпендикуляра от центра тяжести робота к земле. Соответственно, когда центр тяжести робота проецируется на определенную точку, расположенной внутри опорного многоугольника, планирование, что стабильность гарантируются может быть реализовано. Считаем оптимальным положение определенной точки, расположенной в пределах многоугольника опоры.Это оптимальное положение является целью проекции центра тяжести. Показателем для оптимизации в этой статье является стабильность, а идея запаса устойчивости [8] применяется в качестве критерия устойчивости и количественной оценки. Поэтому мы определяем максимизацию запаса устойчивости, чтобы максимизировать запас устойчивости, как целевую функцию.
Запас устойчивости представлен как расстояние между точкой проекции центра тяжести и линией границы многоугольника опоры. А именно, запас устойчивости S ( x , y ) равен минимальному значению из расстояния \ (d_ {i} (x, y) \) между точкой проекции центра тяжести ( x , y ). ), и каждая граничная линия я вспомогательный многоугольник в следующей формуле.
А именно, запас устойчивости S ( x , y ) равен минимальному значению из расстояния \ (d_ {i} (x, y) \) между точкой проекции центра тяжести ( x , y ). ), и каждая граничная линия я вспомогательный многоугольник в следующей формуле.
$$ \ begin {выровнено} S (x, y) = \ min _ {i} d_ {i} (x, y) \ end {выравнивается} $$
(1)
Для статического состояния точка проекции центра тяжести ( x , y ) находится в наборе P , состоящем из всех точек в пределах многоугольника поддержки. Пусть точка максимума запаса устойчивости \ ({\ varvec {p}} _ {\ mathrm {max}} \) будет оптимальной точкой, где запас устойчивости S ( x , y ) максимален, а \ ({ \ varvec {p}} _ {\ mathrm {max}} \) определяется следующим образом.
$$ \ begin {выровнены} {\ varvec {p}} _ {\ mathrm {max}} = \ mathop {\ mathrm {arg ~ max}} \ limits _ {(x, y) \ in P} S (x, y) = \ mathop {\ mathrm {arg ~ max}} \ limits _ {(x, y) \ in P} \ {\ min _ {i} d_ {i} (x, y) \} \ конец {выровнен} $$
(2)
Максимизация запаса устойчивости заключается в обеспечении максимального запаса устойчивости путем решения \ ({\ varvec {p}} _ {\ mathrm {max}} \) в уравнении. (2).
(2).
Решение
Чтобы применить максимизацию запаса устойчивости к реальному роботу, нам нужно решить задачу Ур.(2). Когда опорный многоугольник имеет вписанный круг, \ ({\ varvec {p}} _ {\ mathrm {max}} \) в уравнении. (2) геометрически соответствует центру вписанной окружности. Однако существует случай, когда опорный многоугольник реального робота не имеет вписанной окружности. Таким образом, мы формализуем уравнение. (2) в обобщенный алгоритм, который можно решить на компьютере. Мы обобщаем опорный многоугольник робота, как показано на рис. 2-I, и показываем n -сторонний опорный многоугольник на рис. 3. Пусть i будет \ (i = 0,1, \ ldots, n-1 \) .{i} _ {\ mathrm {max}} \) получается как 2 переменных x , y для максимизации \ (d_ {i} (x, y) \) (целевая функция). Между тем, из определения Ур. (1) запас устойчивости, \ (d_ {i} (x, y) \) должен быть меньше любого другого расстояния \ (d_ {j} (x, y), ~ \ forall j \ notin i \) (Ограничение Условие 1).-1000x833.jpg) {i} _ {\ mathrm {max}} \) выглядит следующим образом.{i} _ {\ mathrm {max}} \) представляет собой центр наибольшего круга, который соприкасается с линией границы и и входит в опорный многоугольник. \ (d_ {i} (x, y) \) обозначается \ ({\ varvec {u}} _ {i} \) и \ ({\ varvec {v}} _ {i} (x, y) \) из геометрического соотношения на рис. 3 и его абсолютное значение может быть удалено из условия ограничения 2 в уравнении. (3). Кроме того, обратите внимание, что \ ({\ varvec {u}} _ {i} \ times {\ varvec {v}} _ {i} (x, y) \) — это линейное выражение для x , y . \ (d_ {i} (x, y) \) выглядит следующим образом.
{i} _ {\ mathrm {max}} \) выглядит следующим образом.{i} _ {\ mathrm {max}} \) представляет собой центр наибольшего круга, который соприкасается с линией границы и и входит в опорный многоугольник. \ (d_ {i} (x, y) \) обозначается \ ({\ varvec {u}} _ {i} \) и \ ({\ varvec {v}} _ {i} (x, y) \) из геометрического соотношения на рис. 3 и его абсолютное значение может быть удалено из условия ограничения 2 в уравнении. (3). Кроме того, обратите внимание, что \ ({\ varvec {u}} _ {i} \ times {\ varvec {v}} _ {i} (x, y) \) — это линейное выражение для x , y . \ (d_ {i} (x, y) \) выглядит следующим образом.
$$ \ begin {выровнено} d_ {i} (x, y) = \ frac {| {\ varvec {u}} _ {i} \ times {\ varvec {v}} _ {i} (x, y) |} {| {\ varvec {u}} _ {i} |} = \ frac {{\ varvec {u}} _ {i} \ times {\ varvec {v}} _ {i} (x, y)} {| {\ varvec {u}} _ {i} |} = \ frac {a_ {i} x + b_ {i} y + c_ {i}} {| {\ varvec {u}} _ { i} |} \ end {align} $$
(4)
\ (a_ {i} \), \ (b_ {i} \) и \ (c_ {i} \) — константы, специфичные для поддержки многоугольника. {i} _ {\ mathrm {max}} \) в конечном итоге резюмируется следующим образом.{i} _ {\ mathrm {max}} = & {} & {} \ mathop {\ mathrm {arg ~ max}} \ limits _ {x, y} \ frac {a_ {i} x + b_ {i} y + c_ {i}} {| {\ varvec {u}} _ {i} |} \\ \ mathrm {st} ~~~ & {} \ forall & {} j \ notin i, ~~~ \ frac {a_ {i} x + b_ {i} y + c_ {i}} {| {\ varvec {u}} _ {i} |} \ le \ frac {a_ {j} x + b_ {j} y + c_ {j}} {| {\ varvec {u}} _ {j} |} \\ & {} \ forall & {} k, ~~~ a_ {k} x + b_ {k} y + c_ {k } \ ge 0 \ end {array} \ end {align} $$
{i} _ {\ mathrm {max}} \) в конечном итоге резюмируется следующим образом.{i} _ {\ mathrm {max}} = & {} & {} \ mathop {\ mathrm {arg ~ max}} \ limits _ {x, y} \ frac {a_ {i} x + b_ {i} y + c_ {i}} {| {\ varvec {u}} _ {i} |} \\ \ mathrm {st} ~~~ & {} \ forall & {} j \ notin i, ~~~ \ frac {a_ {i} x + b_ {i} y + c_ {i}} {| {\ varvec {u}} _ {i} |} \ le \ frac {a_ {j} x + b_ {j} y + c_ {j}} {| {\ varvec {u}} _ {j} |} \\ & {} \ forall & {} k, ~~~ a_ {k} x + b_ {k} y + c_ {k } \ ge 0 \ end {array} \ end {align} $$
(5)
В задаче оптимизации Ур. (5) и целевая функция, и условия ограничения представлены в виде линейного выражения для 2 переменных x , y , и поэтому эта проблема может быть решена с помощью линейного программирования (LP).{i} _ {\ mathrm {max}} \) и граничной линией i и геометрически подразумевает радиус наибольшего круга, который контактирует с граничной линией i и входит в опорный многоугольник.
Применение к фазам «ноги-колесо»
Мы практически применяем максимизацию запаса устойчивости к двуногому роботу с пассивным колесом. Поясним определение опорного полигона для этой ноги колеса робота. Как показано на рис. 4, для этого робота предполагается два типа поддерживающих многоугольников.Опорный многоугольник P формируется путем приложения выпуклой оболочки к области контакта, включая колеса, а опорный многоугольник Q состоит из единственных подошв ног. Мы сравниваем P с Q с точки зрения стабильности, когда центр тяжести ( х , у ) ходов робота кзади к стойке ноги. На рис. 4 четыре позы робота \ (\ textcircled {~ \ scriptsize 1} \, \ sim \, \ textcircled {~ \ scriptsize 4} \) генерируются обратной кинематикой для центра тяжести ( x , y ).Связь между ( x , y ) и P , Q следующая: \ (\ textcircled {~ \ scriptsize 1} \): \ ((x, y) \ in P, ~ (x, y ) \ in Q \), \ (\ textcircled {~ \ scriptsize 2} \): \ ((x, y) \ in P, ~ (x, y) \ in \ mathrm {bd} (Q) \), \ (\ textcircled {~ \ scriptsize 3} \): \ ((x, y) \ in P, ~ (x, y) \ notin Q \) и \ (\ textcircled {~ \ scriptsize 4} \): \ ((x, y) \ in \ mathrm {bd} (P), ~ (x, y) \ notin Q \) соответственно. Здесь \ (\ mathrm {bd} (*) \) представляет границу множества \ (* \). Для поз \ (\ textcircled {~ \ scriptsize 1} \, \ sim \, \ textcircled {~ \ scriptsize 3} \) робот может сохранять позу на скользком кафельном полу, особенно робот не упал в \ (\ textcircled {~ \ scriptsize 3} \), даже если центр тяжести робота расположен позади края подошв ступней (\ ((x, y) \ notin Q \)).Для позы \ (\ textcircled {~ \ scriptsize 4} \) робот падает назад, потому что центр тяжести находится на границе P (\ ((x, y) \ in \ mathrm {bd} (P ) \)). Следовательно, опорный многоугольник, на котором центр тяжести робота может существовать без падения, определяется в этой статье как P .
Здесь \ (\ mathrm {bd} (*) \) представляет границу множества \ (* \). Для поз \ (\ textcircled {~ \ scriptsize 1} \, \ sim \, \ textcircled {~ \ scriptsize 3} \) робот может сохранять позу на скользком кафельном полу, особенно робот не упал в \ (\ textcircled {~ \ scriptsize 3} \), даже если центр тяжести робота расположен позади края подошв ступней (\ ((x, y) \ notin Q \)).Для позы \ (\ textcircled {~ \ scriptsize 4} \) робот падает назад, потому что центр тяжести находится на границе P (\ ((x, y) \ in \ mathrm {bd} (P ) \)). Следовательно, опорный многоугольник, на котором центр тяжести робота может существовать без падения, определяется в этой статье как P .
Сравнения опорного многоугольника Р , включая контакт колес и поддержку многоугольник Q , состоящий только из подошвы ног, когда центр тяжести ( х , у ) ходов робота позади стояние стопы
Мы определяем фазу, когда одна нога двуногого робота приземляется на подошву, а другая нога приземляется на пассивное колесо, как фазу «нога-колесо». В отличие от фазы, когда обе ноги приземляются на подошвы, эффективность максимизации запаса устойчивости для фазы ноги-колесо замечательна из-за разницы в правой и левой контактных площадях. Мы демонстрируем результаты, согласно которым максимизация запаса устойчивости применяется к каждой фазе «опора-колесо» на рис. 5. Стойка, которая приземляется на пассивное колесо в фазе «опора-колесо», поднимает ступню вокруг тангажа на 20 °, сохраняя высоту оси пассивного колеса. как показано в правом нижнем углу рис. 1. Сохранение постоянной высоты оси гарантирует, что контакт между колесом и землей во время движения поворота не смещается и не прижимает колесо к земле.Применяя максимизацию запаса устойчивости к опорным многоугольникам, образованным из подошвы и пассивного колеса на земле, можно получить точки максимума запаса устойчивости, как показано на рис. 5a1 – a4. Здесь, на рис. 5a1 – a4, черные системы координат — это мировые системы координат, указанные на рис. 3, желтые области — опорные многоугольники, красные точки — точки максимума запаса устойчивости, а зеленые кружки — запас устойчивости.
В отличие от фазы, когда обе ноги приземляются на подошвы, эффективность максимизации запаса устойчивости для фазы ноги-колесо замечательна из-за разницы в правой и левой контактных площадях. Мы демонстрируем результаты, согласно которым максимизация запаса устойчивости применяется к каждой фазе «опора-колесо» на рис. 5. Стойка, которая приземляется на пассивное колесо в фазе «опора-колесо», поднимает ступню вокруг тангажа на 20 °, сохраняя высоту оси пассивного колеса. как показано в правом нижнем углу рис. 1. Сохранение постоянной высоты оси гарантирует, что контакт между колесом и землей во время движения поворота не смещается и не прижимает колесо к земле.Применяя максимизацию запаса устойчивости к опорным многоугольникам, образованным из подошвы и пассивного колеса на земле, можно получить точки максимума запаса устойчивости, как показано на рис. 5a1 – a4. Здесь, на рис. 5a1 – a4, черные системы координат — это мировые системы координат, указанные на рис. 3, желтые области — опорные многоугольники, красные точки — точки максимума запаса устойчивости, а зеленые кружки — запас устойчивости. окружности, радиус которых равен запасу устойчивости S ( x , y ).Кружки запаса устойчивости на рис. 5a1 – a4 — это кружки, которые имеют максимальный запас устойчивости. Замечено, что круги запаса устойчивости, максимизированные максимизацией запаса устойчивости, представляют собой наибольшие круги, которые включены в опорные многоугольники, и эти круги контактируют с несколькими граничными линиями опорных многоугольников. Когда эти круги соприкасаются со всеми граничными линиями опорных многоугольников, эти круги соответствуют вписанным окружностям.
окружности, радиус которых равен запасу устойчивости S ( x , y ).Кружки запаса устойчивости на рис. 5a1 – a4 — это кружки, которые имеют максимальный запас устойчивости. Замечено, что круги запаса устойчивости, максимизированные максимизацией запаса устойчивости, представляют собой наибольшие круги, которые включены в опорные многоугольники, и эти круги контактируют с несколькими граничными линиями опорных многоугольников. Когда эти круги соприкасаются со всеми граничными линиями опорных многоугольников, эти круги соответствуют вписанным окружностям.
Результаты максимизации запаса устойчивости ( a 1– a 4) и моделирования динамики ( b 1– b 4)
Решением обратной кинематики для центра тяжести робота Для проецирования на полученные точки максимума запаса устойчивости определяются опорные углы сочленения робота.Мы показываем результаты динамического моделирования, когда эти опорные углы суставов передаются двуногому роботу на симуляторе Choreonoid [10] на рис. 5b1 – b4. Замечено, что роботы сохраняют равновесие, не падая на всех этапах. Кроме того, следуя последовательным командам от Phase1 к Phase2 и от Phase3 к Phase4, роботы могут перемещать свои пассивные колеса, сохраняя баланс. Траектория поворотной ноги, которая катит пассивное колесо, определяется как простая прямолинейная траектория, потому что высота оси пассивного колеса остается постоянной во время скольжения ноги.Чтобы гарантировать плавность траектории центра тяжести робота во времени, в качестве алгоритма траектории принята модель минимального рывка [11]. Модель минимального рывка позволяет плавно интерполировать траекторию движения робота без потери баланса для внезапного изменения точки максимума запаса устойчивости \ ({\ varvec {p}} _ {\ mathrm {max}} \) из-за изменения вспомогательного полигона.
5b1 – b4. Замечено, что роботы сохраняют равновесие, не падая на всех этапах. Кроме того, следуя последовательным командам от Phase1 к Phase2 и от Phase3 к Phase4, роботы могут перемещать свои пассивные колеса, сохраняя баланс. Траектория поворотной ноги, которая катит пассивное колесо, определяется как простая прямолинейная траектория, потому что высота оси пассивного колеса остается постоянной во время скольжения ноги.Чтобы гарантировать плавность траектории центра тяжести робота во времени, в качестве алгоритма траектории принята модель минимального рывка [11]. Модель минимального рывка позволяет плавно интерполировать траекторию движения робота без потери баланса для внезапного изменения точки максимума запаса устойчивости \ ({\ varvec {p}} _ {\ mathrm {max}} \) из-за изменения вспомогательного полигона.
На рис. 6 представлена стойка на одной ноге в Фазе 3, где центр тяжести робота проецируется на центр подошвы без максимизации запаса устойчивости.{\ mathrm {L}} \) проведем сравнение с результатом на рис. 5a3. Мы показываем результат сравнения в таблице 1. Чем больше номер S , тем выше стабильность. Эта эффективность наблюдается в «Максимизации запаса устойчивости (Рис. 5a3)» в Таблице 1. Чем меньше количество | y | тем эффективнее предотвращение раскачивания тела в стороны. Подобным образом это предотвращение наблюдается в «Максимальном запасе устойчивости (Рис. 5a3)» в Таблице 1. Этот результат относительно боковой амплитуды также наблюдается по разнице результатов моделирования между Рис.{\ mathrm {L}} \)
5a3. Мы показываем результат сравнения в таблице 1. Чем больше номер S , тем выше стабильность. Эта эффективность наблюдается в «Максимизации запаса устойчивости (Рис. 5a3)» в Таблице 1. Чем меньше количество | y | тем эффективнее предотвращение раскачивания тела в стороны. Подобным образом это предотвращение наблюдается в «Максимальном запасе устойчивости (Рис. 5a3)» в Таблице 1. Этот результат относительно боковой амплитуды также наблюдается по разнице результатов моделирования между Рис.{\ mathrm {L}} \)
Максимизация запаса устойчивости с боковым ограничением
Хотя максимизация запаса устойчивости позволяет предотвратить раскачивание тела вбок, требуется дополнительное предотвращение, чтобы робот мог проходить через более узкое пространство. В этой статье мы предлагаем максимизацию запаса устойчивости с боковым ограничением путем добавления ограничения относительно y к условиям ограничения максимизации запаса устойчивости. Эта стратегия осуществима на основе добавления следующего условного выражения к условиям ограничения в формуле. (5).
(5).
$$ \ begin {align} — \ varepsilon \ le y \ le \ varepsilon \ end {align} $$
(7)
\ (\ varepsilon \) представляет параметр, относящийся к пределу бокового допуска.
Например, Фаза 3 фаз ноги-колесо, мы показываем результат сравнения между (A) без бокового ограничения и (B) с боковым ограничением Ур. (7) на рис. 7. На рис. 7 стены узкого пространства выделены красным цветом, и мы установили расстояние между стенами 750 мм.{\ mathrm {L}} \) для рис. 7b в таблице 1. По сравнению с результатом для максимизации нормального запаса устойчивости (рис. 5a3) запас устойчивости S уменьшается, тогда как поперечная амплитуда | y | становится меньше и дается как значение \ (\ varepsilon \). Из этого наблюдения было обнаружено, что максимизация запаса устойчивости с боковым ограничением является компромиссной стратегией, которая предотвращает раскачивание корпуса вбок более эффективно за счет уменьшения запаса устойчивости. {\ mathrm {L}} \) также видно, что отношение распределения нагрузки веса к ступне, колесо которой обоснованно увеличивается, кроме предотвращения раскачивания тела в стороны.
{\ mathrm {L}} \) также видно, что отношение распределения нагрузки веса к ступне, колесо которой обоснованно увеличивается, кроме предотвращения раскачивания тела в стороны.
Сравнение в узком пространстве на Phase3
Walknet, био-контроллер для ходьбы гексапода
Как преемник модели Cruse (1980a, b), Walknet изначально разрабатывался как сеть, которая является способна управлять движением системы с 18 степенями свободы (DoF), которая состоит из твердого тела с шестью ножками, каждая из которых имеет три активных сустава (\ (\ upalpha \) -, \ (\ upbeta \) — и \ (\ upgamma \) — стык, рис. 1). Архитектура Walknet в основном содержит шесть принципиально независимых контроллеров, по одному для каждой ветви (рис.3). Эти контроллеры подключаются тремя способами.
Рис. 3 Модули ветвей и их подключение через правила координации (из Dürr et al. 2004). L1, L2, L3 левая передняя, средняя и задняя лапы соответственно. R1, R2 и R3 обозначают соответствующие правые ножки. Знак вопроса указывает на неоднозначность данных об этом влиянии
R1, R2 и R3 обозначают соответствующие правые ножки. Знак вопроса указывает на неоднозначность данных об этом влиянии
(i) Контроллеры ног связаны «горизонтально» посредством правил координации (влияющих на PEP и AEP), а также (ii) «вертикально» связаны через гетерархическую сеть, так называемую сеть мотивационных единиц.Кроме того, (iii) ноги механически связаны через субстрат и тело, что посредством сенсорной обратной связи влияет на контроллер других ног. Поскольку каждый из этих трех уровней связи — механический, мотивационный и уровень правил координации — сам по себе образует повторяющуюся сеть, мы имеем дело с очень сложной динамической системой.
Каждый из контроллеров состоит из нескольких процедурных элементов, в основном Swing-net, Stance-net и Target-net, как показано на Рис. 4, где изображены только два из шести контроллеров.Сеть Stance-net управляет движением стойки, Swing-net контролирует траекторию движения Swing, Target-сети содержат информацию о конечном положении движения Swing, используемую соответствующей Swing-сеткой. В общем, параметры в версиях Walknet, то есть веса нейронных сетей, оптимизируются вручную или изучаются в автономном режиме, чтобы соответствовать наблюдаемым поведенческим данным.
В общем, параметры в версиях Walknet, то есть веса нейронных сетей, оптимизируются вручную или изучаются в автономном режиме, чтобы соответствовать наблюдаемым поведенческим данным.
Общая архитектура Walknet. Показаны только два контроллера ног (подробности см. На рис.5). Верхняя часть содержит блоки мотивации (все отмечены красным цветом ), образующими гетерархическую сеть, влияющую на процедуры ( черных ящика , например, Swing-net, Stance-net, Target-net_fw и Target-net_bw, представляющие конец точка махового движения для ходьбы вперед и назад соответственно). Кроме того, существуют единицы мотивации «более высокого уровня», такие как нога1, ходьба, а также вперед (fw) и назад (bw). Блок мотивации, способный контролировать координационное влияние между ногами 1 и 2, отмечен r1.Единицы мотивации образуют рекуррентную нейронную сеть, связанную в одном или двух направлениях положительными ( стрелки, ) и отрицательными (Т-образные связи) воздействиями. В нижней части рисунка ( пунктирная рамка, мышцы / тело / окружение) схематично изображена «петля по миру»
В нижней части рисунка ( пунктирная рамка, мышцы / тело / окружение) схематично изображена «петля по миру»
За прошедшие годы Walknet подвергся детальным изменениям, чтобы охватить определенные аспекты. Некоторые процедуры до сих пор тестировались только в изолированных программных симуляторах, но (пока) не реализованы ни в одной полной версии Walknet, чтобы сохранить сложность в управляемом диапазоне.В фактической реализации Walknet, установленной на роботе Hector (Paskarbeit et al. 2010; Schneider et al. 2011), несколько из этих версий реализуются параллельно. Таким образом, их можно тестировать отдельно.
Общая архитектура Walknet проиллюстрирована на рис. 4. В верхней части (красным) показаны блоки мотивации, под ними — процедуры (черные ящики). Тело (плюс окружение) изображено пунктирной рамкой. Сначала мы опишем контроллер ноги, а затем объясним правила координации.Затем мы сосредоточимся на сети модулей мотивации и, наконец, кратко охарактеризуем моделирование тела в различных версиях Walknet.
Контроллер ног
Как показано на рис. 4, контроллер ног состоит из нескольких функциональных элементов, наиболее важными процедурами являются Stance-net, Swing-net и Target-net. Поскольку на рис. 4 эти процедуры определены функционально, а не морфологически, они представлены в виде отдельных прямоугольников. В отличие от более ранних утверждений (Daun-Gruhn and Büschges 2011), это функциональное разделение не означает, что архитектура Walknet требует разделения нейронов на блоки, принадлежащие сети, подчиняющиеся исключительно контроллеру Swing или контроллеру Stance.Скорее, ничего не говорится о связях между возможно соответствующими интернейронами и мотонейронами биологической системы. Функциональное разделение между Swing-net и Stance-net касается только сенсорного ввода, тогда как оба разделяют моторный выход и могут также разделять соответствующие интернейроны. Это более подробно проиллюстрировано на рис. Сеть, соответствующая сети Swing, изображена слева, а сеть, соответствующая сети Stance, — справа. На этом рисунке в качестве резюме объединены элементы, которые частично были смоделированы изолированно и которые будут описаны в оставшейся части этого раздела.
На этом рисунке в качестве резюме объединены элементы, которые частично были смоделированы изолированно и которые будут описаны в оставшейся части этого раздела.
Контроллер ноги получает обильные сенсорные сигналы, которые на Рис. 5 изображены элементами, показанными черным цветом. Этот ввод касается положения и скорости углов суставов, тактильного контакта на поверхности ноги и / или нагрузки на ногу, но может также включать тактильные датчики на теле, а также датчики, отслеживающие удаленные стимулы (например,g., глаза, антенны или акустические датчики).
Рис. 5 Сетевая диаграмма, описывающая контроллер ноги, которая суммирует ряд наблюдений за поведением, как подробно описано в тексте. Правая сторона отображает сенсорный ввод, относящийся к управлению стойкой, левая сторона, соответственно, сенсорный ввод, необходимый для управления раскачивающим движением. Пары единиц, изображенные синим цветом в центре (транспортир-ретрактор, леватор-депрессор, сгибатель-разгибатель), которые связаны посредством взаимного торможения (Т-образные соединения), представляют абстрактную версию сети, показанной Шуммом и Крузом ( 2006 г. , их рис.7). Для определения углов суставов \ (\ upalpha, \ upbeta \) и \ (\ upgamma \) см. Рис. 1. Два модуля мотивации (качели, стойка, отмечены красным ) управляют сенсорным входом в сеть управления через тормозные связи
, их рис.7). Для определения углов суставов \ (\ upalpha, \ upbeta \) и \ (\ upgamma \) см. Рис. 1. Два модуля мотивации (качели, стойка, отмечены красным ) управляют сенсорным входом в сеть управления через тормозные связи
Приступим к описанию возможностей Swing-net, разные версии которого разработаны. Общим для всех версий — три из них будут схематизированы ниже — это то, что Swing-net получает сенсорную информацию от суставов ног (положение, скорость), а также информацию, касающуюся AEP (предоставляемую сетью Target, см. Ниже), и выдает заданные сигналы к двигательной системе.Эти выходные сигналы используются для создания траектории поворота (см. Моделирование элементов тела ниже). В зависимости от конкретной версии Swing-net может производить поисковые движения (Dürr 2001; Bläsing 2006) и управлять рефлексами избегания (например, Schumm and Cruse 2006; Dürr et al. 2004)
Swing-net 1 (подробности см. Dürr et al. al. 2004) представляет собой простую сеть прямого распространения (6 входов, 3 выхода, по одному на каждое соединение) с небольшим количеством весов. По сути, он состоит из трех контроллеров отрицательной обратной связи, по одному на каждое соединение.Совместные значения, соответствующие AEP в качестве целевой позиции, образуют опорные значения. Контроллер \ (\ upbeta \) получает влияние перекрестных помех от соединения \ (\ upalpha \). Это соединение отвечает за подъем ноги во время направленного вперед движения сустава \ (\ upalpha \). Недостатком сети Swing-net 1 является то, что ее нельзя использовать напрямую для ходьбы назад. Это отличается от Swing-net 2, где подъем ноги в \ (\ upbeta \) — суставе производится не за счет соединения его с \ (\ upalpha \) — суставом, а за счет антагонистического элемента внутри \ (\ upbeta \) — контроллер.Этот элемент заставляет ногу сначала двигаться вверх, а затем снова опускаться. В Swing-net 3 \ (\ upbeta \) — контроллер упрощен за счет использования антагонистической архитектуры сенсомоторной системы, обнаруженной в биологической системе (Schumm and Cruse, 2006, их рис.7), что приводит к структуре, схематически изображенной на рис.
По сути, он состоит из трех контроллеров отрицательной обратной связи, по одному на каждое соединение.Совместные значения, соответствующие AEP в качестве целевой позиции, образуют опорные значения. Контроллер \ (\ upbeta \) получает влияние перекрестных помех от соединения \ (\ upalpha \). Это соединение отвечает за подъем ноги во время направленного вперед движения сустава \ (\ upalpha \). Недостатком сети Swing-net 1 является то, что ее нельзя использовать напрямую для ходьбы назад. Это отличается от Swing-net 2, где подъем ноги в \ (\ upbeta \) — суставе производится не за счет соединения его с \ (\ upalpha \) — суставом, а за счет антагонистического элемента внутри \ (\ upbeta \) — контроллер.Этот элемент заставляет ногу сначала двигаться вверх, а затем снова опускаться. В Swing-net 3 \ (\ upbeta \) — контроллер упрощен за счет использования антагонистической архитектуры сенсомоторной системы, обнаруженной в биологической системе (Schumm and Cruse, 2006, их рис.7), что приводит к структуре, схематически изображенной на рис. 5. Подъем ноги теперь производится за счет тормозящего эффекта отдачи из-за взаимного торможения между нейронами, управляющими двигательной отдачей, в данном случае, в соответствии с биологической номенклатурой, системой леватор-депрессор.На рис.5 нейронные структуры, соответствующие схеме, данной Шуммом и Крузом (2006, рис.7), символизируются двумя единицами (изображенными синим цветом), соединенными взаимным торможением (поскольку робот Гектор не имеет антагонистических двигательных систем, мы реализовал Swing-net 3 путем введения фильтра высоких частот (HPF) в \ (\ upbeta \) — контроллер, показывающий ту же функциональность только при ходьбе по плоской поверхности). Как Swing-net 2, так и Swing-net 3 могут использоваться для ходьбы вперед и назад, просто используя разные запоминающие устройства AEP и PEP (представленные полями Target-net на рис.4, 5).
5. Подъем ноги теперь производится за счет тормозящего эффекта отдачи из-за взаимного торможения между нейронами, управляющими двигательной отдачей, в данном случае, в соответствии с биологической номенклатурой, системой леватор-депрессор.На рис.5 нейронные структуры, соответствующие схеме, данной Шуммом и Крузом (2006, рис.7), символизируются двумя единицами (изображенными синим цветом), соединенными взаимным торможением (поскольку робот Гектор не имеет антагонистических двигательных систем, мы реализовал Swing-net 3 путем введения фильтра высоких частот (HPF) в \ (\ upbeta \) — контроллер, показывающий ту же функциональность только при ходьбе по плоской поверхности). Как Swing-net 2, так и Swing-net 3 могут использоваться для ходьбы вперед и назад, просто используя разные запоминающие устройства AEP и PEP (представленные полями Target-net на рис.4, 5).
Различные рефлексы избегания, которые возбуждаются во время замаха, были реализованы в Walknet как простое расширение Swing-net (Cruse et al. 1998, на рис. 5 показан только рефлекс Levator, подробности см. В Schumm and Cruse 2006). . Более поздние версии Walknet позволяют продолжать движение качелей путем поиска движений, когда агент входит в яму (не показано на рис. 5, но см. Dürr 2001; Bläsing 2006).
1998, на рис. 5 показан только рефлекс Levator, подробности см. В Schumm and Cruse 2006). . Более поздние версии Walknet позволяют продолжать движение качелей путем поиска движений, когда агент входит в яму (не показано на рис. 5, но см. Dürr 2001; Bläsing 2006).
Для Stance-net также есть несколько версий, но они не представляют возможные альтернативы, как в случае с тремя Swing-сетями, а обращаются к различным, функционально разделимым аспектам одного контроллера, которые моделировались только изолированно.На рисунке 5 показан полный контроллер. Общая особенность состоит в том, что во время движения в стойке (и во время остановки) тело должно сохранять определенное расстояние до земли. Это осуществляется путем воздействия на \ (\ upbeta \) — контроллер с помощью простого (отрицательная обратная связь) контроллера высоты на основе сенсорной информации, касающейся положений суставов ног, или на основе нелинейной сети с прямой связью (контроллер высоты, рис. 5). обучены на основе биологических данных (Cruse et al. 1998). Эта система может быть описана (нелинейным) пропорциональным регулятором, качественно характеризующимся тем, что каждая ножка представляет собой мягкий пружинный элемент, действующий параллельно дорсо-вентральной оси.
1998). Эта система может быть описана (нелинейным) пропорциональным регулятором, качественно характеризующимся тем, что каждая ножка представляет собой мягкий пружинный элемент, действующий параллельно дорсо-вентральной оси.
Для управления движением / силой, необходимой для приведения тела в движение, самым простым решением является введение трех контроллеров с отрицательной обратной связью, использующих углы PEP в качестве опорных значений. Такая система проста в изготовлении, но имеет недостаток, заключающийся в том, что из-за механического соединения между ногами по телу могут действовать нежелательные силы, требующие излишне больших крутящих моментов (Леви (2009) предложил возможный способ справиться с этой проблемой, см. Ниже , минимизация крутящего момента). В качестве альтернативного решения идея использования положительной обратной связи по скорости, восходящая к основополагающим исследованиям Бесслера (1976, 1983), была применена к Walknet Cruse et al.(1996), Киндерманн (2002) с использованием кинематического и динамического моделирования и Schmitz et al. (2008) с использованием физического робота. В то время как во время движения в стойке все суставы, связанные телом и окружающей средой, должны быть скоординированы, основная идея положительной обратной связи по скорости заключается в том, что эта координация не является результатом явной координации и вычислений. Вместо этого влияния между всеми этими суставами опосредуются непосредственно через тело, и каждый сустав локально только пытается продолжить прилагаемые извне движения на уровне совместных скоростей.С этой целью \ (\ upalpha \) — сустав и \ (\ upgamma \) — сустав подвергаются положительной обратной связи по скорости, тогда как \ (\ upbeta \) — сустав управляется отрицательной обратной связью по положению. Следуя этой архитектуре управления, шагающий может адаптироваться к произвольным формам основы, в то время как все 18 суставов управляются локальными контроллерами, соединенными через корпус и основу.
В качестве совершенно другого решения, которое, однако, функционально очень похоже на положительную обратную связь по скорости, была представлена кинематическая модель тела для управления движением позы (Schilling et al. 2012; Шиллинг 2011). Такая внутренняя модель тела, образующая нервную структуру, способна представить любое геометрически возможное положение тела, включая ноги. При использовании Walknet для управления движениями стойки, вся система функционально аналогична подходу с положительной обратной связью по скорости, поскольку она может адаптироваться к любой структуре поверхности и позволяет легко контролировать ходьбу по кривой (Schilling et al. 2012). Однако нет никаких намеков на то, что такая внутренняя модель тела используется насекомыми.
2012; Шиллинг 2011). Такая внутренняя модель тела, образующая нервную структуру, способна представить любое геометрически возможное положение тела, включая ноги. При использовании Walknet для управления движениями стойки, вся система функционально аналогична подходу с положительной обратной связью по скорости, поскольку она может адаптироваться к любой структуре поверхности и позволяет легко контролировать ходьбу по кривой (Schilling et al. 2012). Однако нет никаких намеков на то, что такая внутренняя модель тела используется насекомыми.
Для управления стоячим положением, конечно, можно было бы использовать вышеупомянутый простой контроллер с отрицательной обратной связью, если бы были заданы эталонные значения для желаемых положений ног.Однако, чтобы соответствовать биологическим данным (см. Ниже, раздел 4), была разработана несколько более сложная схема (схематически изображенная на рис. 5), которая не требует явного указания желаемых положений ног, как будет объяснено в следующий.
Во время стояния, согласно исследованию Cruse et al. (2004), все три сустава ноги на земле, по-видимому, контролируются определенным интегральным контроллером (рис. 5, \ (\ sum \) (1), сенсорная обратная связь от \ (\ upalpha \), \ (\ upbeta \) или \ (\ upgamma \) соответственно), т.е., система отрицательной обратной связи, которая способна поддерживать на нуле ошибку между фактическим положением и желаемым положением (или референтным положением, заданным как \ (\ sum \) (2) на рис. 5). Для каждого сочленения интегратор, необходимый для интегрального регулятора, указан в поле \ (\ sum \) (1). Этот элемент объединяет ошибку контроллера, то есть разницу между текущим углом (\ (\ upalpha, \ upbeta \) или \ (\ upgamma) \) и эталонным значением. Как показано на рис. 5, контроллер \ (\ upbeta \) — дополнительно зависит от входных данных от сетки высоты для управления зазором кузова.В отличие от традиционного интегрального регулятора, при определенных условиях (см. Ниже) эталонное значение как таковое может постепенно адаптироваться к значению, которое аналогично или даже идентично фактическому значению.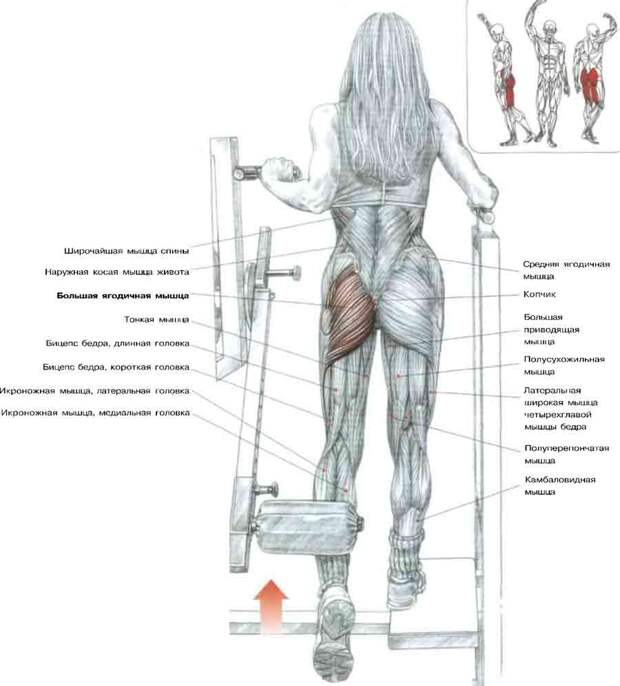 Это свойство связано с тем, что контур положительной обратной связи добавляет сигнал ошибки к интегратору, представленному как \ (\ sum \) (2) на рис. 5. Благодаря этому дополнительному контуру обратной связи, через достаточное время задание будет соответствовать реальная стоимость. Таким образом, вся система может показать свойства пропорционального регулятора или даже дифференциального регулятора.К последним свойствам приближаются тем больше, чем жестче субстрат (Cruse et al. 2004, не изображено на рис. 5). Таким образом, опорное значение адаптируется к текущему положению. Поэтому явное указание эталонных значений не требуется. Эта схема была смоделирована и испытана изолированно для одного и двух соединений Schneider et al. (2007).
Это свойство связано с тем, что контур положительной обратной связи добавляет сигнал ошибки к интегратору, представленному как \ (\ sum \) (2) на рис. 5. Благодаря этому дополнительному контуру обратной связи, через достаточное время задание будет соответствовать реальная стоимость. Таким образом, вся система может показать свойства пропорционального регулятора или даже дифференциального регулятора.К последним свойствам приближаются тем больше, чем жестче субстрат (Cruse et al. 2004, не изображено на рис. 5). Таким образом, опорное значение адаптируется к текущему положению. Поэтому явное указание эталонных значений не требуется. Эта схема была смоделирована и испытана изолированно для одного и двух соединений Schneider et al. (2007).
На рис. 5 концептуально показан способ, как эта схема, используемая для стояния, может быть объединена с решением с положительной обратной связью по скорости, описанным выше и применяемым для ходьбы (Schneider et al.2008; Schmitz et al. 2008 г.). Напомним, что эталонные значения для последующих интегральных контроллеров представлены прямоугольниками \ (\ sum \) (2). Чтобы получить полную систему, показывающую положительную обратную связь по скорости, совместные контроллеры сустава \ (\ upalpha \) и сустава \ (\ upgamma \) получают дополнительные входные данные, представляющие угловую скорость соответствующего сустава (см. Входные данные \ ( \ dot {\ alpha}, \ dot {\ gamma} \) на рис. 5). Контроллер \ (\ upbeta \) — не получает этот ввод, потому что он отвечает за управление высотой.Эта гипотеза может объяснить — на первый взгляд противоречивый — результат того, что ноги во время стойки также подвергаются отрицательной обратной связи (Bartling and Schmitz 2000).
Напомним, что эталонные значения для последующих интегральных контроллеров представлены прямоугольниками \ (\ sum \) (2). Чтобы получить полную систему, показывающую положительную обратную связь по скорости, совместные контроллеры сустава \ (\ upalpha \) и сустава \ (\ upgamma \) получают дополнительные входные данные, представляющие угловую скорость соответствующего сустава (см. Входные данные \ ( \ dot {\ alpha}, \ dot {\ gamma} \) на рис. 5). Контроллер \ (\ upbeta \) — не получает этот ввод, потому что он отвечает за управление высотой.Эта гипотеза может объяснить — на первый взгляд противоречивый — результат того, что ноги во время стойки также подвергаются отрицательной обратной связи (Bartling and Schmitz 2000).
PEP: При ходьбе вперед, как упоминалось выше, заднее крайнее положение PEP, т. Е. Переход от стойки к маху, считается наиболее важным параметром, при котором координация между ногами влияет на квазициклическое движение ноги (Cruse, 1990). ). У свободно гуляющего животного PEP не следует рассматривать как заданную точку в трехмерном пространстве, так как расстояние между телом и предплюснением может варьироваться в зависимости от геометрии текущего субстрата.Измерения на идущем вперед животном показали (Burkamp 1996), что точка, в которой происходят переходы между стойкой и замахом, лучше аппроксимируется участком примерно сферической поверхности, которая может быть представлена трехслойным перцептроном прямой связи, обозначенным прямоугольником PEP. на рис. 5. Эта «сеть PEP» была впервые представлена в версии Walknet, показанной в (Cruse et al. 1998). Однако для упрощения и ускорения моделирования PEP обычно определяется только координатой x (т. Е. Параллельно длинной оси тела), что является подходящим упрощением, если используются относительно ровные поверхности.На значение PEP могут влиять правила координации (см. Ниже) и нагрузка. Последний был представлен в Walknet Шиллингом и др. (2007), в результате чего повышенная нагрузка смещает PEP назад.
). У свободно гуляющего животного PEP не следует рассматривать как заданную точку в трехмерном пространстве, так как расстояние между телом и предплюснением может варьироваться в зависимости от геометрии текущего субстрата.Измерения на идущем вперед животном показали (Burkamp 1996), что точка, в которой происходят переходы между стойкой и замахом, лучше аппроксимируется участком примерно сферической поверхности, которая может быть представлена трехслойным перцептроном прямой связи, обозначенным прямоугольником PEP. на рис. 5. Эта «сеть PEP» была впервые представлена в версии Walknet, показанной в (Cruse et al. 1998). Однако для упрощения и ускорения моделирования PEP обычно определяется только координатой x (т. Е. Параллельно длинной оси тела), что является подходящим упрощением, если используются относительно ровные поверхности.На значение PEP могут влиять правила координации (см. Ниже) и нагрузка. Последний был представлен в Walknet Шиллингом и др. (2007), в результате чего повышенная нагрузка смещает PEP назад.
AEP: переход от качания к стойке запускается при контакте с землей качающейся ногой. В более ранних версиях Walknet контакт ноги с землей представлялся логической переменной. В версии Schilling et al. (2007) вместо контакта с землей было введено аналоговое значение, представляющее нагрузку, которое при достижении заданного значения активирует блок мотивации стойки, который, в свою очередь, подавляет блок мотивации качелей (рис.5, объяснение единиц мотивации см. Ниже). В более ранних версиях сенсорный ввод в эти единицы, теперь называемые единицами мотивации, назывался «селекторной сетью» (например, Dürr et al. 2004).
Правила координации
Как упоминалось ранее, ноги могут быть связаны посредством механических и / или нейронных воздействий. Несколько правил, описывающих координацию между ногами, были получены из поведенческих экспериментов на насекомых с тростью, передвигающейся вперед (Cruse 1990), и реализованы Дином 1991a, b, 1992a, b; Кальвитти и пиво 2000). На рис. 3 правила пронумерованы 1–6. Правила координации 1–3 влияют на продолжительность движения стойки, влияя на переход от стойки к движению махом, то есть они изменяют значение PEP. Правило 4 представлено специальной версией сети Target (Dean 1990), которая передает текущее положение передней ноги, которая используется принимающей ногой в качестве цели поворота. Другими словами, правило 4 влияет на AEP. Поскольку критические эксперименты проводились с животными, у которых механическое соединение между ногами было исключено (Cruse 1979b; Cruse and Epstein 1982; Cruse and Schwarze 1988; Cruse and Knauth 1989), необходимо постулировать (пока неизвестную) нейронную основу для Правило 1–4.
На рис. 3 правила пронумерованы 1–6. Правила координации 1–3 влияют на продолжительность движения стойки, влияя на переход от стойки к движению махом, то есть они изменяют значение PEP. Правило 4 представлено специальной версией сети Target (Dean 1990), которая передает текущее положение передней ноги, которая используется принимающей ногой в качестве цели поворота. Другими словами, правило 4 влияет на AEP. Поскольку критические эксперименты проводились с животными, у которых механическое соединение между ногами было исключено (Cruse 1979b; Cruse and Epstein 1982; Cruse and Schwarze 1988; Cruse and Knauth 1989), необходимо постулировать (пока неизвестную) нейронную основу для Правило 1–4.
На основании исследований Грэхема (1972, его рис. 7, 8) с использованием свободно ходящих насекомых, параметры, описывающие правило 3, зависят от скорости ходьбы (Дин 1991b). Эта зависимость отличается для правила 3, действующего между ипсилатеральными ногами (спереди назад при ходьбе вперед) и действующего между парами контралатеральных ног. Вместе эти связи способствуют формированию повторяющейся сети. Ниже показано словесное описание с последующей формулировкой псевдокода того, как правила 1–3 реализуются в реальной версии Walknet для ходьбы вперед (все расстояния указаны в метрах, расстояние между AEP по умолчанию и PEP по умолчанию равно 0.3 м).
Вместе эти связи способствуют формированию повторяющейся сети. Ниже показано словесное описание с последующей формулировкой псевдокода того, как правила 1–3 реализуются в реальной версии Walknet для ходьбы вперед (все расстояния указаны в метрах, расстояние между AEP по умолчанию и PEP по умолчанию равно 0.3 м).
Правило 1 запрещает начало качания принимающей ветви, пока передающая ветвь находится в качании, плюс заданная зависящая от скорости задержка (delay_1b) после завершения качания. Это достигается путем смещения PEP назад и может препятствовать началу поворота. Правило 1 действует между ипсилатеральными ногами сзади вперед.
Задержка зависит от скорости:
Правило 2 сдвигает PEP вперед после того, как передающая нога начала стойку плюс заданная задержка (270 мс).Это влияние действует в течение 50 мс. Правило 2 может вызвать начало замаха, когда принимающая нога отошла достаточно далеко назад. Правило 2 действует между ипсилатеральными ногами сзади вперед и между контралатеральными ногами.
Правило 2 действует между ипсилатеральными ногами сзади вперед и между контралатеральными ногами.
Правило 3 сдвигает PEP получателя вперед, когда передающая нога достигла заданного положения во время стойки, таким образом, возможно, вызывая качание принимающей ноги. Критическое положение передающей ноги зависит от скорости и различается для влияний между ипсилатеральными ногами и между контралатеральными ногами.Это влияние активно во время заданного окна позиции отправляющего участка. Правило 3 действует между ипсилатеральными ногами спереди назад и между парами контралатеральных ног в обоих направлениях.
Пороговая тяга зависит от скорости:
Смещение PEP зависит от направления и опоры воздействия:
Конечно, у свободно гуляющего животного механические воздействия тоже могут влиять, что, в частности, может быть правдой. для части, зависящей от скорости.
При увеличении нагрузки на ногу, как уже было сказано выше (3. 1), локальный эффект, заключающийся в том, что ПЭП смещается назад (или вперед после разгрузки ноги), и в то же время возникает эффект координации, заключающийся в том, что соседние ноги развивают более высокие силы. Последнее было названо правилом 5. Schilling et al. (2007) реализовали оба эффекта таким образом, что сигнал нагрузки, используемый каждым отдельным контроллером ноги для поддержки выбора между стойкой и махом, также передается контроллерам соседних ног. Если выше порогового значения, эти сигналы просто добавляются к локальному сигналу, зарегистрированному ногой (на рис.5).
1), локальный эффект, заключающийся в том, что ПЭП смещается назад (или вперед после разгрузки ноги), и в то же время возникает эффект координации, заключающийся в том, что соседние ноги развивают более высокие силы. Последнее было названо правилом 5. Schilling et al. (2007) реализовали оба эффекта таким образом, что сигнал нагрузки, используемый каждым отдельным контроллером ноги для поддержки выбора между стойкой и махом, также передается контроллерам соседних ног. Если выше порогового значения, эти сигналы просто добавляются к локальному сигналу, зарегистрированному ногой (на рис.5).
Правило 6 будет рассмотрено в Разд. 4, поскольку до сих пор он не реализован в Walknet.
Модули мотивации
Walknet в версии, описанной ранее (Dürr et al. 2004), представляет собой сеть, которая может управлять только ходьбой вперед. Чтобы позволить системе автономно выбирать между различными режимами поведения, Walknet был расширен за счет введения сети, состоящей из так называемых модулей мотивации, показанных на рис. 4 и 5 отмечены красным (Schilling et al. 2007; Schilling and Cruse 2008, подробности см. В Schilling et al.Отправлено). Примеры такого различного поведения включают выбор между стоянием и ходьбой, между ходьбой вперед и назад (Schilling et al., Представлен; Cruse and Schilling 2013) или, в качестве будущего расширения, ходьба на четырех ногах, подобная богомолу, где передние ноги могут быть используются в качестве захватов вместо ног. В последнем случае, в дополнение к процедурам поворота и стойки, для передних ног должны быть введены процедуры, позволяющие контролировать движения захвата.
4 и 5 отмечены красным (Schilling et al. 2007; Schilling and Cruse 2008, подробности см. В Schilling et al.Отправлено). Примеры такого различного поведения включают выбор между стоянием и ходьбой, между ходьбой вперед и назад (Schilling et al., Представлен; Cruse and Schilling 2013) или, в качестве будущего расширения, ходьба на четырех ногах, подобная богомолу, где передние ноги могут быть используются в качестве захватов вместо ног. В последнем случае, в дополнение к процедурам поворота и стойки, для передних ног должны быть введены процедуры, позволяющие контролировать движения захвата.
Такая архитектура также применялась для системы моделирования под названием Navinet (Cruse and Wehner 2011; Hoinville et al.2012), который контролирует навигацию насекомых, где животные могут выбирать между различными изученными источниками пищи, между путешествием к источнику пищи или возвращением домой или вниманием к изученному ориентиру в зависимости от фактического контекста. Footnote 2
Здесь используются единицы мотивации для обозначения силы мотивации для выполнения соответствующего поведения. Согласно Maes (1991) и Hassenstein (1983), оба вдохновлены К. Лоренцем, способность выполнять поведение зависит от кооперативного влияния соответствующих сенсорных стимулов и силы их мотивации.Типичные примеры мотивационных состояний — это борьба, контролирующая агрессию, или страх, контролирующий бегство. Но в зависимости от степени детализации определения поведенческих элементов, мотивационные состояния могут также касаться «микроповедения». Примеры, относящиеся к Walknet, — это мах или стойка ноги.
Единицы мотивации применяются двумя способами. Во-первых, блоки мотивации могут определять результат процедуры, которая в простейшем случае выполняется путем умножения (поскольку может применяться более нейрональная версия, основанная на ингибирующих соединениях антагонистических структур).Для этого каждый процедурный элемент снабжен блоком мотивации. Следовательно, не только Swing-net и Stance-net, как в Schilling et al. (2007), но также все Target-сети (Schilling and Cruse 2008), а также каналы координации ног оснащены собственным блоком мотивации.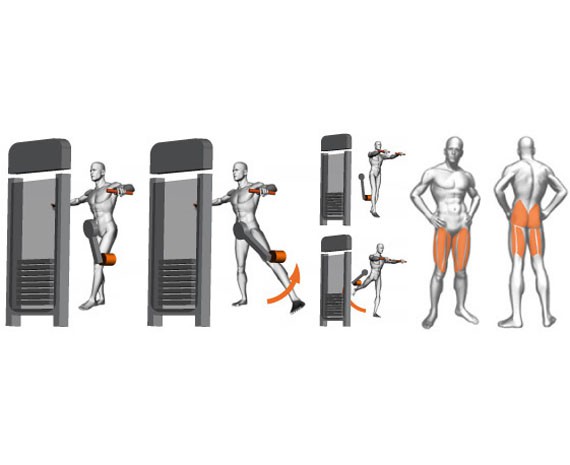
Во-вторых, единицы мотивации также могут использоваться для воздействия на другие единицы мотивации через возбуждающие или тормозящие связи. Как показано на рис. 4, блоки мотивации, управляющие процедурами одной ноги, подключены к блоку «ноги», а все блоки ног, в свою очередь, подключены к блоку «ходьба».Кроме того, существуют блоки для ходьбы вперед («fw») и ходьбы назад («bw»). Однако эта на первый взгляд иерархическая структура не образует простого древовидного ветвления. Как показано двунаправленными связями, единицы мотивации образуют повторяющуюся нейронную сеть, соединенную положительными (стрелки) и отрицательными (Т-образные связи) влияниями. Поэтому эту структуру лучше описать как «гетерархическую». Например, некоторые из этих единиц мотивации связаны локальными связями «победитель получает все» (WTA).Это верно для Swing-net и Stance-net одной ноги, а также для разных сетей Target, управляющих одной и той же ногой. Только одно из подразделений, принадлежащих такой сети WTA, может быть активным в любое время. Например, может быть выбрана только одна из доступных целевых сетей, в зависимости от того, какая единица мотивации, «fw» или «bw», активна. Возбуждающие связи между единицами мотивации позволяют создавать коалиции или кластеры. Как показано на рис. 4, возможны различные перекрывающиеся ансамбли. Например, все единицы «ноги» и единицы «ходьба» активируются во время ходьбы назад и во время ходьбы вперед, но только одна из двух единиц, называемых «вперед» и «назад», и только одна из единиц мотивации Целевого объекта. сети активны в любом случае, что позволяет выбрать соответствующую целевую сеть.
Например, может быть выбрана только одна из доступных целевых сетей, в зависимости от того, какая единица мотивации, «fw» или «bw», активна. Возбуждающие связи между единицами мотивации позволяют создавать коалиции или кластеры. Как показано на рис. 4, возможны различные перекрывающиеся ансамбли. Например, все единицы «ноги» и единицы «ходьба» активируются во время ходьбы назад и во время ходьбы вперед, но только одна из двух единиц, называемых «вперед» и «назад», и только одна из единиц мотивации Целевого объекта. сети активны в любом случае, что позволяет выбрать соответствующую целевую сеть.
Организация сети подразделений мотивации позволяет проводить соревнования на разных уровнях. Например, на уровне ног участники соревнования выбирают колебательные движения и стойки, а на более глобальном уровне можно выбрать направление ходьбы (вперед / назад) или общее поведение, такое как ходьба или остановка.
Таким образом, эта сеть создает различные стабильные состояния аттрактора или «внутренние состояния». Такие внутренние состояния не только позволяют выбрать поведенческие элементы, но также обеспечивают контекст, в соответствии с которым используются определенные сенсорные входы или нет.Например, в качестве примера более низкого уровня, в зависимости от того, находится ли нога в состоянии качания или в состоянии стойки, данный сенсорный вход может обрабатываться по-разному: стимуляция определенного органа чувств (рис.5) приводит к рефлексу леватора, когда в движении, но не во время стойки. На более высоком уровне, например, при ходьбе вперед или назад, для определения AEP и PEP используются разные сенсорные данные. В качестве более интересного примера, в вышеупомянутом Navinet визуальный ввод, характеризующий известный ориентир, используется только тогда, когда он принадлежит ориентирам, ведущим к фактически адресованному источнику пищи.
Как и в случае с единицами мотивации Swing-net и Stance-net, также единицы мотивации «более высокого уровня» могут получать прямую или косвенную информацию от сенсорных единиц, которые влияют на активацию этой единицы мотивации (не показано на рис. . 4).
. 4).
Функция модулей мотивации для Swing-net и Stance-net уже использовалась в более ранних версиях Walknet в форме модулей вывода так называемой селекторной сети (например, Dürr et al. 2004). Взаимное торможение не применялось в этих более ранних версиях, поскольку обучение сети единиц мотивации привело к другому распределению весов (Cruse et al.1993а, 1995а). Взаимное торможение было введено Schilling et al. (2007). Единицы мотивации для ходьбы вперед и назад были применены в так называемой «дистрибьюторской сети» (Schilling and Cruse 2008, их рис. 9). Чтобы переключиться между ходьбой вперед и назад, Ayers and Davis (1977), а позднее Tóth et al. (2012) предложили очень похожие схемы. Айерс и Дэвис (1977) назвали свои блоки управления командными нейронами.
Моделирование тела и окружающей среды
Версии Walknet различаются в зависимости от того, в какой степени реализована имитация окружающей среды, в частности тела.В более ранних версиях использовалась простая кинематическая симуляция тела.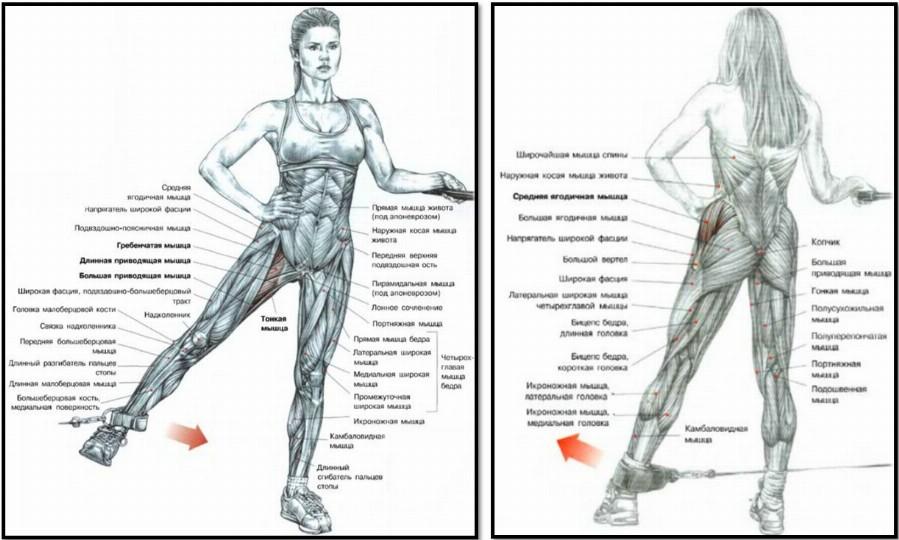 В более поздних версиях использовались разные способы динамического моделирования тела. Наконец, Walknet был протестирован на различных платформах роботов (Espenschied et al. 1993; Ferrell 1995; Flannigan et al. 1998), включая ходунки TUM (например, Pfeiffer et al. (1995), Tarry II (Frik et al. 1999). ) и Tarry IIB (например, Schmitz и др., 2008 г.). Разработанный в настоящее время робот-гексапод Hector содержит последовательные упругие элементы (Paskarbeit et al. 2010; Schneider et al.2011), чтобы дать первое приближение к свойствам биологических актуаторов.
В более поздних версиях использовались разные способы динамического моделирования тела. Наконец, Walknet был протестирован на различных платформах роботов (Espenschied et al. 1993; Ferrell 1995; Flannigan et al. 1998), включая ходунки TUM (например, Pfeiffer et al. (1995), Tarry II (Frik et al. 1999). ) и Tarry IIB (например, Schmitz и др., 2008 г.). Разработанный в настоящее время робот-гексапод Hector содержит последовательные упругие элементы (Paskarbeit et al. 2010; Schneider et al.2011), чтобы дать первое приближение к свойствам биологических актуаторов.
Моделирование сцепления через подложку в ранней кинематической версии Walknet было упрощено за счет предположения, что все ноги в стойке принимают одинаковую скорость (Müller-Wilm et al. 1992; Cruse et al. 1993a, 1995a, b). В более поздних, все еще кинематических симуляторах, основанных на управлении движением стойки через положительную обратную связь по скорости, эти механические составляющие реализованы явно (Cruse et al. 1996, 1998; Kindermann 2002).Механическое соединение между ногами также рассматривается в более поздних динамических симуляциях (Шиллинг и др., 2007; Шмитц и др., 2008; Шнайдер и др., 2011) и, конечно же, с помощью аппаратного моделирования, то есть упомянутых выше роботов.
1996, 1998; Kindermann 2002).Механическое соединение между ногами также рассматривается в более поздних динамических симуляциях (Шиллинг и др., 2007; Шмитц и др., 2008; Шнайдер и др., 2011) и, конечно же, с помощью аппаратного моделирования, то есть упомянутых выше роботов.
Несмотря на то, что в конечном итоге кинематическое моделирование подверглось критике как слишком простое, оно может быть неплохим приближением для насекомого с тростью (в отличие от робота), потому что массы тела, в частности ног, малы, а трение в суставах высокий (e.г., Hooper et al. 2009 г.). Мышцы до сих пор явно не реализованы в Walknet. Вместо этого эта функция примерно аппроксимируется генераторами крутящего момента, используемыми в подходах динамического моделирования и приложениях к физическим роботам. Недавно Аннунциата и Шнайдер (2012) разработали симулятор мышц для двигателей, которые фактически реализованы в роботе Гектор, которым будет управлять Walknet.
Fightraining: The Kettlebell Swing Simulator
Fightraining: The Kettlebell Swing SimulatorСимулятор качания гири
Существуют различные рукоятки, которыми можно пользоваться с гантелями для махов, но я никогда не чувствовал себя очень комфортно ни с одним из них. В основном потому, что, если я ослаблю хватку, гантель полетит к ближайшей стене моей квартиры! Хотя я бы хотел иметь набор настоящих гирь (и Clubbells ©, если на то пошло), у меня никогда не было средств.
В основном потому, что, если я ослаблю хватку, гантель полетит к ближайшей стене моей квартиры! Хотя я бы хотел иметь набор настоящих гирь (и Clubbells ©, если на то пошло), у меня никогда не было средств.
Эта идея принадлежит Дэну Джону. Если вы еще не зашли на его сайт, вас ждет угощение. Я очень рекомендую это. Я получил эту идею от одного из его Get Up! статьи. Я предлагаю проверить все это Get Up! информационные бюллетени и не пропустите его книгу Opus.У него много информации, и все загрузки БЕСПЛАТНЫ.
Инструкции по основам симулятора содержатся в его выпуске 7. Встать, том 2. Его можно скачать здесь. Единственная модификация, которую я сделал, заключалась в замене рукояток на 3-дюймовую трубу. Это упрощает пропуск ног, а когда вы беретесь за Т и рукоятку, это больше напоминает рукоятку гири. Если у вас действительно большие руки, Вы можете пойти немного шире. Для безопасности я рекомендую немного зайти за край.Убедитесь, что вы взяли как можно больше буквы T. При необходимости можно добавить ленту. Я также сделал стойку 10-дюймовой вместо 12-дюймовой трубы. Это делает общую высоту очень близкой к реальной гири. Я также добавил трубный зажим к верхней части весового стека. Это позволяет выполнять полную технику свинга Crossfit. Видео о качелях и множество других упражнений Crossfit можно найти здесь.
При необходимости можно добавить ленту. Я также сделал стойку 10-дюймовой вместо 12-дюймовой трубы. Это делает общую высоту очень близкой к реальной гири. Я также добавил трубный зажим к верхней части весового стека. Это позволяет выполнять полную технику свинга Crossfit. Видео о качелях и множество других упражнений Crossfit можно найти здесь.
Happy Swinging!
ДОМ
Введение
% PDF-1.4
%
1 0 obj
>
endobj
7 0 объект /Заголовок
/Предмет
/ Автор
/Режиссер
/ Ключевые слова
/ CreationDate (D: 20210208035912-00’00 ‘)
/ ModDate (D: 20130226161000 + 01’00 ‘)
>>
endobj
2 0 obj
>
endobj
3 0 obj
>
endobj
4 0 obj
>
endobj
5 0 obj
>
endobj
6 0 obj
>
транслировать
2002-04-17T11: 34: 14Z2013-02-26T16: 10 + 01: 002013-02-26T16: 10 + 01: 00Acrobat Distiller 4. 0 для Windowsapplication / pdf
0 для Windowsapplication / pdf

