
Сведение ног в тренажере. Изучаем все тонкости и секреты.
Приветствую всех читателей проекта Азбука Бодибилдинга! Как обычно по средам у нас техническая заметка, и сегодня мы ее посвятим одному женскому неординарному упражнению под названием сведение ног в тренажере. Почему неординарному? Об этом Вы узнаете ближе к концу заметки, так что придется дочитать до конца, как бы не хотелось. По ходу пьесы мы познакомимся с анатомическим атласом, техникой выполнения, а также преимуществами, которое это упражнение может дать.
Итак, прошу всех садиться, поехали.
Сведение ног в тренажере. Что, к чему и почему?
Не знаю, замечали ли парни в тренажерном зале, но у девчонок (также как и у них/нас) есть свои любимые упражнения и качательные машинки, которые им ближе всего и, так сказать, по душе. К одной из таких машинок относится тренажер для сведения (разведения) ног, призванный прорабатывать внутреннюю/внешнюю сторону бедра. Эта ножная зона является проблемной у многих женщин (опа-на, были девушки, а уже стали женщины, и это всего за две строчки писанины :)) , и поэтому при любой удобной возможности представительницы прекрасного пола липнут к соответствующему тренажеру.
Примечание:
Для лучшего усвоения материала все дальнейшее повествование будет разбито на подглавы.
Анатомический атлас
Основная причина залипания дам у тренажера для сведения ног это то, что он предназначен подтянуть приводящие мышцы (область между ног), сделать их более упругими, жесткими и, как следствие, избавить женщину от различного “киселя” в этой области. Другими словами, внутренняя поверхность бедер (аддукторы) – эстетически важная зона ног для женщин, также мужчинам она небезразлична, и они хотят видеть ее у своих избранниц подтянутой и не висячей.
Анатомический атлас мышц, участвующих в движении, представляет собой следующую картину:
Приводящая машина (так называется тренажер для сведения мышц ног) в первую очередь направлена на укрепление трех приводящих мышц – короткой, длинной и большой приводящей. Также активируются тонкие, гребенчатые и портняжные мышцы (последняя идет по всей длине бедра), происходит подтяжка мышц подвздошно-большеберцового тракта.
Вообще стоит сказать, что приводящие мышцы являются одними из самых относительно крупных и протяженных мышц ног — это целый комплекс мускулов глубокого залегания внутренней поверхности бедра и паха. Их трудно нащупать, т.к. они “погребены” заживо под другими мышцами, например, четырехглавой. Однако можете быть уверены, вы используете эти мышцы при подъемах по лестнице, восхождении в гору и при вставании.
В виду того, что приводящие мышцы практически не задействованы в повседневной жизни, они являются очень слабыми и поэтому их тренировке нужно уделять особое внимание.
Преимущества
Выполняя сведение ног в тренажере, Вы вправе рассчитывать на:
- укрепление мышц внутренней поверхности бедра;
- подтяжку (лифтинг) приводящих мышц-аддукторов;
- более лучшую форму “междуножья” (плавные/гладкие линии внутренней части бедер);
- более крепкие ножные объятия в постели, когда происходит обхват партнера бедрами;
- повышение основной стабильности (баланса) во время движения;
- улучшение походки и осанки;
- снижение травм, связанных со слабостью мышц бедра.

Техника выполнения
Это одно из самых незамысловатых упражнений, в котором практически нельзя ошибиться. Само приведение означает перемещение части тела (в данном случае ног) по направлению к центру тела. Когда Вы садитесь на тренажер, движение заключается в преодолении сопротивления при сближении бедер, изначально отстоящих друг от друга.
Сам тренажер выглядит следующим образом и имеет место быть в залах, начиная со “средней руки”:
Пошагово техника выполнения выглядит так.
Шаг №0.
Подойдите к тренажеру и установите требуемый вес отягощения. Затем отрегулируйте ширину седла так, чтобы Вы чувствовали легкое растяжение приводящих мышц, когда бедра находятся на мягких пэдах (боковые площадки-валики). Держите спину прямой и плотно прижатой к спинке тренажера. Руками ухватитесь за поручни внизу, а ноги согните в колене до угла в 90 градусов или чуть больше. Раскройте ноги, разведя их до уровня установленной ширины тренажера. Это исходное положение.
Это исходное положение.
Шаг №1.
Вдохните, на выдохе подконтрольно начните сжимать бедра. Держите ноги прямо, сохраняя колени над ступнями. В конечной точке траектории максимально притяните бедра друг к другу и задержитесь на
Шаг №2.
Медленно на вдохе начните разводить валики и остановите их в слегка “недоведенной” до ИП позиции, чтобы постоянно сохранять напряжение в тренируемой мышце. Повторите заданное количество раз.
В картинном варианте все это безобразие выглядит следующим образом:
Практические советы
Чтобы получить максимальную пользу от упражнения, следуйте нижеприведенным советам:
- не плюхайте вес, возвращая его в ИП;
- медленно разводите ноги слегка не доводя их до позиции старта;
- в промежутках между подходами растягивайте приводящие мышцы, используя, например, позу Лотоса сидя и давя руками на колени;
- во время выполнения не двигайте корпусом и не елозьте ягодицами по сиденью тренажера;
- используйте упражнение как вспомогательное (добивание) при тренировке мышц-аддукторов и ставьте его в конец тренировки после выполнения основного объема;
- если чувствуете, что в последнем подходе уже не можете выполнять упражнение в полную амплитуду, используйте быструю серию из укороченных повторов.

Идем далее и теперь поговорим про…
Сведение ног в тренажере: эффективно ли оно для сжигания жира внутренней части бедер?
Если спросить у “залипших” на тренажере для сведения ног девушек: чего Вы хотите добиться с помощью приводящей машины, то большинство из них ответит – я хочу, чтобы похудела внутренняя сторона ляжек. Однако стоит понимать, что этого никогда не произойдет, т.к. тренажер предназначен для укрепления приводящих мышц, а не для сжигания жира – это два различных типа ткани, и укрепление мышц никак не приведет к снижению жира, их покрывающих. Даже если Вы сжигаете калории во время выполнения упражнения, Вы не можете уменьшить жир в конкретной (отдельно взятой) области.
Вывод: тренажер для сведения ног не предназначен для похудения бедер, и он не способен сделать их стройными.
Сведение ног в тренажере: стоит ли заморачиваться?
Часто в выборе тренажера под тренировку конкретной мышцы люди ориентируются на его конструкцию и узкозаточенность. Например, если тренажер на сведение ног, то и соответствующую область, внутреннюю поверхность бедра, он и должен подкачать. В большинстве своем это так, т.е. изоляционная машина направлена на проработку только одной мышечной группы.
Например, если тренажер на сведение ног, то и соответствующую область, внутреннюю поверхность бедра, он и должен подкачать. В большинстве своем это так, т.е. изоляционная машина направлена на проработку только одной мышечной группы.
Однако что касается приводящего тренажера, то несмотря на его любимость барышнями, он не позволяет добиться конечных целей, в частности — уменьшения бедер (и как следствие стройности ног) у женщин и набор массы у мужчин (если бедро у них тощее).
И все дело тут в том, что на самом деле целевой регион (внутреннее/внешнее бедро) работает в координации с остальными частями тела. Кроме того, движение в этом тренажере не функциональное (неестественное для организма), т.е. нигде не применяется за пределами зала. Прогресс в весе идет достаточно быстро, но чем он больше, тем это сильнее напрягает позвоночник. Коленная чашечка также не скажет Вам спасибо от все возрастающей нагрузки.
Таким образом получается, что как бы Вы ни использовали тренажер для сведения ног, он с большой долей вероятности не изменит Ваш композитный состав ног, для этих целей это бесполезный инструмент. И все дело тут в биомеханике движения. Сама по себе конструкция тренажера сидячая, поэтому мышцы бедер в таком положении никак не работают. Часто бывает, что люди приходят в зал после трудового сидячего дня (допустим офисный сотрудник) дабы разогнать кровь и привести мышцы в тонус. И, как ни странно, выбирают сами (или по совету тренера) для тренировки мышц сидячий тренажер. Это не верно. Необходимо выбирать упражнения, в которых требуется удержать баланс и которые используют свободные веса и хождение/стояние с отягощением. В частности, сведение ног можно заменить на перекрестные выпады или отведение ноги на блоке — они позволяют добиться значительно лучшего “тюнинга” ног.
И все дело тут в биомеханике движения. Сама по себе конструкция тренажера сидячая, поэтому мышцы бедер в таком положении никак не работают. Часто бывает, что люди приходят в зал после трудового сидячего дня (допустим офисный сотрудник) дабы разогнать кровь и привести мышцы в тонус. И, как ни странно, выбирают сами (или по совету тренера) для тренировки мышц сидячий тренажер. Это не верно. Необходимо выбирать упражнения, в которых требуется удержать баланс и которые используют свободные веса и хождение/стояние с отягощением. В частности, сведение ног можно заменить на перекрестные выпады или отведение ноги на блоке — они позволяют добиться значительно лучшего “тюнинга” ног.
Примечание:
Сказанное не стоит воспринимать как полную несостоятельность приводящего тренажера для проработки соответствующих мышц, нет. Его можно использовать как вспомогательное упражнение к основным (или реабилитационное в случае получения травм) и включать в конец тренировки, но работа только с ним не даст никакого прогресса в улучшении формы Ваших ног, помните это и не западайте на тренажер как исключительный для тренировки мышц внутренней поверхности бедра.

Думаю, возник резонный вопрос: для чего в залах устанавливают подобные, средне-низкой эффективности, тренажеры. Ответ – если бы их не было, фитнес-центры отвадили бы от своего посещения большую часть женской клиентуры. Вкупе с тем, что женщины боятся свободных весов и стать слишком большими и мышечными, им проще выбрать лайтовую нагрузку по себе.
Поэтому дамы – в деле улучшения форм внутренней части бедер используйте приводящий тренажер с умом и не зацикливайтесь только на нем.
Собственно, у меня все, что хотел — доложил, теперь давайте подытожимся.
Послесловие
Сегодня мы разбирались с упражнением сведение ног в тренажере. Уверен, теперь Вы знаете, как найти этой ненужной груде железа машинке грамотное применение и как с ней правильно управляться.
На сим все, стройных Вам бедер, дамочки!
PS. А Вы используете это упражнение в своей программе тренировок? А теперь будете?
PPS. Помог проект? Тогда оставьте ссылку на него в статусе своей социальной сети — плюс 
С уважением и признательностью, Протасов Дмитрий.
Вы можете пропустить чтение записи и оставить комментарий. Размещение ссылок запрещено.
Сведение ног в тренажере для внутренней части бедер
Сведение ног сидя в тренажере является популярным упражнением для нижней части тела. Его часто включают в комплексную программу тренировок нижней части тела, вместе с базовыми упражнениями. Сведения позволяют изолированно нагрузить мышцы внутренней поверхности бедра.
Проработка мышц
Какие именно мышцы получают нагрузку во время сведения ног на тренажере? В первую очередь упражнение задействует мышцы внутренней части бедра, как было сказано выше. Если говорить конкретнее, то это тонкие и приводящие мышцы. Дополнительно включается в работу пресс, мышцы-разгибатели позвоночника и поясница.
Задействованные мышцы: 1 — гребенчатая; 2,3,4 — короткая, длинная, большая приводящие мышцы.Сведение ног сидя в тренажере не относится к базовым движениям.
По этой причине его нужно сочетать с другими упражнениями для развития мышц бедер и ягодиц. Это позволит добиться гармоничной и красивой фигуры.
Также можно чередовать его с таким упражнением, как разведение ног сидя. Такой подход сделает ваши занятия более эффективными.
Описание упражнения
Как выполнять сведение ног сидя? Для начала займите правильное исходное положение. Для этого установите необходимый вес на тренажере. Рекомендуемая пробная нагрузка для женщин составляет 10–15 кг. Для мужчин – 20–25 кг. Подобрать подходящий вес не составит труда. Установите среднюю нагрузку и постарайтесь выполнить один подход. Если вы сможете сделать 10 повторений и при этом почувствуете явное утомление мышц, вам подходит выбранное отягощение.
Выполнение упражнения.Перед выполнением упражнения убедитесь в том, что вес вашего тела приходится на седалищные кости. Расправьте грудь, поместите ноги за специальные мягкие упоры и максимально широко разведите их. Руками возьмитесь за рукоятки. Теперь можно приступить к основной части упражнения.
Теперь можно приступить к основной части упражнения.
- На вдохе напрягите пресс и сведите ноги вместе. Ненадолго задержитесь в положении максимального напряжения.
- Медленно вернитесь в начальное положение и выдохните.
Упражнение подходит для любого уровня физической подготовки. Ориентируясь на свои ощущения, выполните от 10 до 15 повторений. Отдохните в течение 30 секунд. В это время желательно встать и немного размять ноги. Повторите сведение ещё 1–2 подхода.
Полезные советы
Для того чтобы ваша тренировка дала наилучшие результаты, ознакомьтесь со следующими рекомендациями.
- Перед выполнением упражнения разомните тазобедренные суставы и потяните паховые связки. Это позволит мышцам лучше воспринимать нагрузку, а также увеличит амплитуду движений.
- Некоторые тренеры советуют менять положение спины во время сведения ног, так как это позволяет проработать разные участки мышц. Сделайте первую половину повторов, отклоняя спину назад, после чего с прямым корпусом наклонитесь вперёд.
- Также можно менять положение носков. Направляя их внутрь или наружу, вы сможете смещать нагрузку в сторону передней или задней поверхности бедра.
- Следите за тем, чтобы спина оставалась ровной. Ни в коем случае не горбите спину на последних повторениях! Если у вас не осталось сил, сократите упражнение или помогите себе преодолеть сопротивление с помощью рук.
- Работайте медленно и избегайте резких движений. Старайтесь не использовать силу инерции.
- Важную роль играет заминка. Ваши мышцы будут достаточно эластичными только в том случае, если вы не будете пропускать растяжку.
 Кроме увеличения эффективности упражнения, растяжка способствует выводу из мышц молочной кислоты, тем самым снимая болезненные ощущения, которые обычно возникают на следующий день после тренировки.
Кроме увеличения эффективности упражнения, растяжка способствует выводу из мышц молочной кислоты, тем самым снимая болезненные ощущения, которые обычно возникают на следующий день после тренировки.
Не забывайте о том, что, как и другие силовые упражнения, сведение и разведение ног сидя не способствуют похудению. Их цель заключается в укреплении мышц. Если же вы хотите уменьшить объем ваших бедер, дополните тренировку кардио упражнениями. Лучше всего подойдёт эллиптический и велотренажер. Занимайтесь 3–4 раза в неделю, выбирая программы с умеренно высокой интенсивностью. В идеале следует заниматься аэробными нагрузками сразу же после силового тренинга.
Таким образом, сведение и разведение ног, выполняемые в тренажере – это дополняющие друг друга упражнения, которые позволяет проработать мышцы бедер. Их регулярное выполнение сделает фигуру красивой, а ноги сильными.
Экспертное мнение: упражнения, которыми нельзя пренебрегать настоящим мужчинам
Эксперт рубрики Be Strong за долгие годы работы в зале подметил, что большинство мужчин пренебрегают доброй половиной упражнений по самым странным причинам.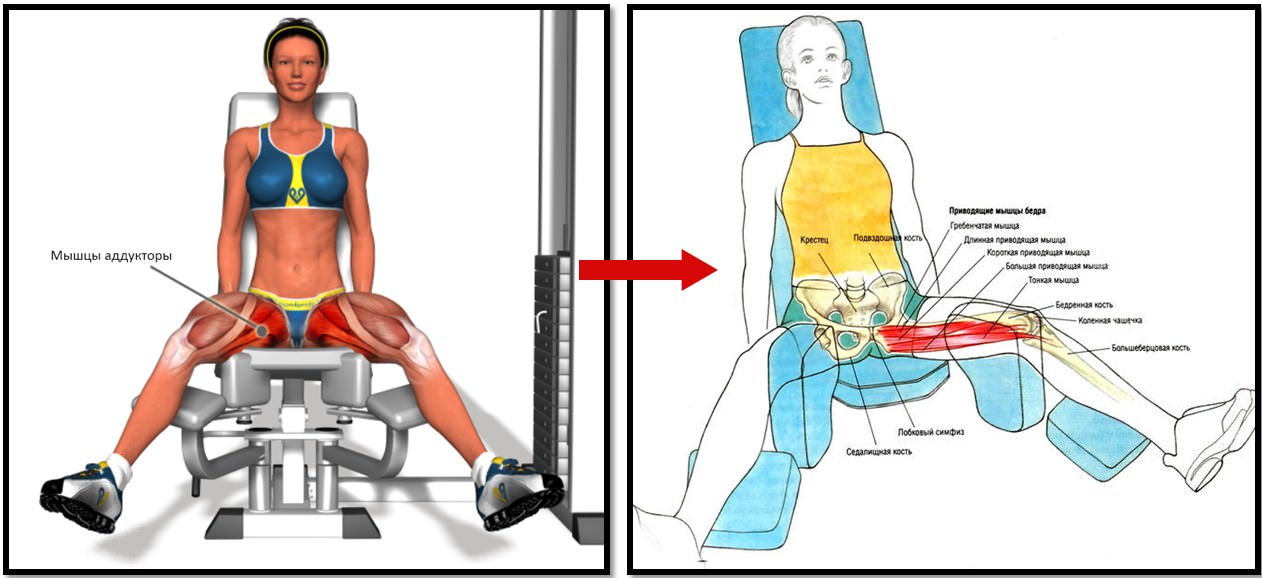 А качают исключительно грудь и бицепс. О последствиях такого игнора наша статья.
А качают исключительно грудь и бицепс. О последствиях такого игнора наша статья.
Сегодня мы обсудим по-настоящему полезные упражнения, которыми пренебрегают многие мужчины. Дело чаще всего в домыслах, что эти упражнения только для женщин, да и многие не понимают их значимости.
Но тело нужно развивать гармонично по 3 причинам.
- Нарушение баланса кровеносной системы
Когда вы игнорируете упражнения на ноги и ягодицы, возникает дисбаланс в кровеносной системе.
Развитые тренированные мышцы верхней части корпуса имеют обширную капиллярную сетку, чтобы обеспечивать полное обогащение мышц кислородом и питательными веществами. Кровеносная система нижней части корпуса остаётся неразвитой. Из-за дисбаланса сильно увеличивается нагрузка на сердце, что может привезти к развитию заболеваний.
- Появление болей в пояснице и суставах
Природа заложила, что мышцы нижних конечностей должны составлять 60% от общей массы тела. Не расстраивайте природу. Качайте ноги и попу.
Не расстраивайте природу. Качайте ноги и попу.
Неправильное развитие организма делает невозможным его нормальную стабилизацию в пространстве. Мышцы кора ослабляются, что приводит к болям в пояснице.
- Нарушение эстетики
Ну и вид избушки на курьих ножках, это же не дело, ребята.
Я расскажу о преимуществах каждого игнорируемого вами упражнения. Но вот побороть стеснение вам предстоит самостоятельно.
Тяга на прямых ногах или румынская тяга
Цель: проработать заднюю поверхность бедра (ягодицы, бицепс бедра, мышцы подколенного сухожилия).
Это упражнение, выполняющееся в немного неудобной позиции, в основном полюбилось дамам за развитие ягодичных мышц и оформление приятных округлостей.
Но румынская тяга — одно из наиболее подходящих упражнений для построения массы задней части бедра. Пренебрегая им, мужчины обрекают себя на диспропорцию мышц нижней части тела.
Сведение и разведение ног в тренажере
Цель: проработка внешней и внутренней части бедра (приводящие мышцы, ягодицы, портняжные, мышцы тазового дна и промежности).

Очень большая редкость — увидеть на этих тренажерах мужчину. Исключение составляют профи, осведомлённые о необходимости развития гармоничного тела, и мужчины пожилого возраста. А вот девушки от них без ума — выполняют упражнения и стоя, и боком, и задом, что делать, кстати, нежелательно. Но об этом в другой статье.
Благоприятное воздействие этих упражнений на мужской организм – не только изолированная прокачка мышц, но улучшение половой жизни. Да-да, сведения и разведения благоприятно влияют на простату и потенцию, так что занимайте очередь к этому оборудованию, которая образуется после выхода этой статьи.
Ягодичный мостик
Цель: включить в работу мышцы кора, ягодицы, мышцы тазового дна.
Мужчин смущает это упражнение, его они тоже оставили женщинам, а зря. Упражнение включает в интенсивную работу попеременно пресс и ягодицы. Одно простое движение и двойная польза.
Обратные горизонтальные подтягивания
Цель: включить в работу мышцы спины, плечевой пояс, бицепс рук, предплечья.
Вспомните школу, когда мальчиков на физкультуре вели к турнику подтягиваться в висе, а девочек – на горизонтальное подтягивание. Если честно, выполнять женскую, по мнению физруков, версию не так уж просто. Попробуйте и убедитесь сами.
Вертикальный пуловер в кроссовере
Цель: задействовать мышцы спины и плечевой пояс.
Это упражнение игнорируется не из-за женской принадлежности, а из-за трудности его реализации. Выполняя пуловер, обязательно попросите тренера проконтролировать технику: ошибки этого упражнения видны только со стороны.
Хотя пуловер и выглядит, как упражнение на трицепс, делать нужно совсем другое движение.
Избегайте работы в локтевом суставе. Вся работа выполняется плечами.
Вся работа выполняется плечами.
Подъем на носках в тренажере или сгибания стопы
Цель: работа икроножных мышц.
Развить икроножные мышцы — это гигантский труд. Приготовитесь к тяжёлой, кропотливой работе над этой частью тела, которая вам кажется не столь приметной. Тогда летом вы сможете гордо носить не только майки, но и шорты.
Сгибание и разгибание кистей
Цель: развить мускулатуру предплечья, включив в работу мышцы сгибатели и разгибатели.
Здесь дело обстоит также, как и с икроножными мышцами. Хотя нет — ещё хуже. Если на ногах мы проводим относительно много времени, и икроножные мышцы хоть как-то работают, то предплечья обычно отдыхают. А именно от их силы зависит цепкость и выносливость рук. Все упражнения и движения из реальной жизни, когда требуется удержать что-либо в руках, а также все висы и подтягивания будет даваться легче с развитыми предплечьями.
Так что уделяйте достойное внимание упражнениям на все мышцы, даже такие незначительные, на первый взгляд, как икроножные. Они тоже заслуживают уважения и прокачки!
До встречи в зале!
Съемка прошла в фитнес центре Max Fitness
Адрес: Московский пр-т 11/5, Кишинев, Молдова
Телефон: 022442700/ 060400700
Сохранить
(9328)
comments powered by HyperComments7 тренажеров, от которых больше вреда, чем пользы
Спортивная индустрия с гордостью представляет нам десятки тренажеров, пользу которых можно оценить в спортзале или дома. Классические и новейшие модели в равной степени пользуются популярностью, однако ученые не устают напоминать, что не все тренажеры одинаково полезны.
Редакция AdMe.ru перечислила наиболее опасные (а порой и бесполезные) тренировочные устройства, от которых эксперты настоятельно рекомендуют держаться подальше.
1. Тренажер Смита
Чем опасен: Фиксированная траектория перемещения груза заставляет суставы двигаться совершенно неудобным для них способом. Таким образом, используя данный тренажер, вы не только рискуете здоровьем суставов, но и можете серьезно травмировать крупные и мелкие мышцы.
Cовет: Приседания, жим лежа и жим над головой можно выполнять без тренажеров, используя гантели или штангу. Впрочем, нижние планки тренажера можно безопасно приспособить для выполнения наклонных отжиманий.
2. Жим ногами
Чем опасен: Ваши ноги достаточно сильны для того, чтобы ежедневно выдерживать вес всего тела. Так что нагрузка на тренажере должна превосходить его, чтобы обеспечить достаточное сопротивление. В таком положении вес приходится на поясницу, и вы всерьез рискуете заработать межпозвоночную грыжу. К тому же при движении не задействуется ни одна стабилизирующая мышца бедер, ягодиц, плеч и поясницы..jpg) Поэтому тренировка на таком тренажере не только опасна, но и малоэффективна.
Поэтому тренировка на таком тренажере не только опасна, но и малоэффективна.
Совет: Замените тренажер приседаниями с гантелей / гирей. Давление на поясницу частично снимается за счет груза в руках. К тому же гантеля заставляет вас сохранять определенное положение, задействуя множество мышц одновременно. Иногда более легкий груз позволяет сжечь больше калорий.
3. Вертикальный блок (с заведением за голову)
Чем опасен: Такое положение крайне травмоопасно для вашего тела. Выполняя упражнение подобным образом, вы перегружаете капсулу плечевого сустава, что может привести к разрыву мышц плечевого пояса.
Совет: Попробуйте негативные подтягивания. Они помогут укрепить мышцы плеч, спины, кора, ног и рук. Либо выполняйте упражнение, держа руки перед собой — это намного безопаснее.
4. Сгибание / разгибание ног
Чем опасен: Так как весовая нагрузка приходится в основном на лодыжки, тренажер усиливает крутящий момент в коленном суставе, заставляя его быстрее изнашиваться и болеть. К тому же эта конструкция заставляет вас выполнять движение, которое почти не имеет практического применения в реальной жизни.
К тому же эта конструкция заставляет вас выполнять движение, которое почти не имеет практического применения в реальной жизни.
Совет: Вышагивания на платформу заставляют квадрицепсы работать гораздо эффективнее любого тренажера, а также активно задействуют ягодицы и икры. Когда множество мышц включаются в работу, колени не изнашиваются, а, наоборот, укрепляются.
5. Жим на грудь сидя
Чем опасен: Помимо того, что положение тела само по себе неудобное, этот тренажер может провоцировать асимметрию мышц. Если одна рука у вас от природы сильнее, она автоматически будет брать на себя большую часть работы и, соответственно, быстрее накачиваться.
Совет: Выполняйте старые добрые отжимания. Они распределяют нагрузку на руки в равной степени, в противном случае вы непременно начнете заваливаться на одну сторону и не сможете полноценно выполнить упражнение. Более того, отжимания заставляют работать мышцы кора, отвечающие за устойчивость и равновесие.
6. Сведение / разведение ног
Чем опасен: Помимо того, что этот тренажер рассчитан на выполнение движений, которых мы не совершаем в жизни, он дает ненужную нагрузку на илиотибиальный тракт — сухожилие, соединяющее несколько мышц боковой поверхности бедра. Таким образом, используя этот тренажер, вы рискуете вызвать смещение коленного сустава.
Совет: Попробуйте приседания на одной ноге. Это отличное упражнение, задействующее мышцы внутренней и внешней поверхностей бедер, а также мышцы-стабилизаторы.
7. Подъем на носки стоя
Чем опасен: Хотя сама идея заключается в том, чтобы поднимать вес с помощью икр, устройство механизма таково, что основное давление приходится на позвоночник. Даже если такая нагрузка не спровоцирует искривление, то уж боль в спине обеспечит запросто.
Совет: Выполняйте подъем на носки с собственным весом в положении стоя. Такое упражнение также заставит работать мелкие стабилизирующие мышцы ног. Если обычный подъем на носки не обеспечивает вас достаточной нагрузкой, попробуйте выполнять его на одной ноге.
Опасный спорт. 5 тренажёров, которые могут навредить девушкам | Секреты красоты | Здоровье
Хочу начать заниматься с тренером, но знаю, что не все тренажёры одинаково полезны и женщинам, и мужчинам. На что нужно обратить особое внимание?
Дарья Вудина, Самара
– Большинство новичков в спортзале получают травмы уже в первый месяц. Для многих это становится окончанием занятий. Потому что на восстановление уходит время, в течение которого стартовый энтузиазм угасает. Часто такие люди в спортзал уже не возвращаются, – констатирует травматолог-ортопед Юрий Глазков. – Чтобы избежать таких ситуаций, нужно соблюдать основные правила безопасных тренировок. А кроме того, желательно выбирать правильные тренажёры. Все они могут быть опасными в случае нецелевого использования.
Делайте упражнения правильно, выбирайте тренажёры с умом и не стесняйтесь задавать вопросы более опытным спортсменам или фитнес-тренеру. Это убережёт вас от травм и сохранит мотивацию к тренировкам.1. Сгибание ног в тренажёре сидя
Большинство женщин приходит в зал не за физической силой, а за красотой. Стройная фигура, плоский живот, привлекательные бёдра и ягодицы – вот цели, которые ставят перед собой девушки, увлекающиеся спортом. Поэтому особой популярностью пользуются тренажёры, которые нагружают бёдра. Многие любят тренажёр для сгибания ног сидя. И зря. Потому что это упражнение не базовое, а изолированное. Оно тренирует не все мышцы ног, а только переднюю поверхность бедра. К тому же на этом тренажёре можно получить травму. Чрезмерное усилие ведёт к переразгибанию колена, в результате чего повреждается сустав.
Занятия на этом тренажёре можно заменить приседаниями. Приседать можно как со штангой, так и без неё. Это упражнение полностью безопасно. К тому же прорабатывает все мышцы ног.
Фото: Shutterstock.com2. Сведение или разведение ног в тренажёре
Особенно травмоопасен этот тренажёр для женщин, которые ещё не определили оптимальную для себя нагрузку. Если она будет чрезмерной, то начинающая спортсменка может пытаться доделывать повторения рывками. При этом задействуются не только мышцы, но и связки. Возможны их надрывы. От этого упражнения без проблем и ущерба для тренировочного процесса можно отказаться. Большинство делают его, чтобы приобрести стройные ноги. Но локальное сжигание жира невозможно – чтобы худеть, нужно тратить калории. А при выполнении сведений или разведений ног затрачивается их не так много, потому что это изолированные упражнения, задействующие не так много мышц.
Фото: Shutterstock.com3. Тренажёр для жима лёжа
Жим лёжа считается безопасным упражнением. Но только в том случае, если тренироваться правильно. Это утверждение справедливо в отношении любого тренажёра: правильно выбирайте нагрузку, соблюдайте технику упражнения, не делайте нецелевых упражнений – и вы наверняка не травмируетесь. Но правила часто нарушаются, что приводит к печальным последствиям.
Жим лёжа многие женщины делают, не разобравшись как следует в правильной технике выполнения упражнения. В процессе тренировки нельзя слишком сильно сгибать ноги, запрещается отрывать поясницу. В первом случае риску подвергаются колени, во втором – позвоночник.
Читайте также: Удобно и безопасно. Делаем зарядку в любимом кресле
Фото: Shutterstock.com4. Ротация корпуса в тренажёре
При выполнении этого упражнения корпус приходится поворачивать отдельно от зафиксированного на месте таза. Это движение не является физиологичным. В жизни мы так никогда не поворачиваемся. А так как к подобным нагрузкам организм непривычен, возможны травмы. Чаще всего негативным последствием использования тренажёра становится боль в спине. Особенно если вы поворачиваете корпус с чрезмерно большой амплитудой. У вас могут сильно напрягаться мышцы, которые находятся в непосредственной близости от позвоночника. Возрастает нагрузка и на сам позвоночный столб. Результатом может стать болевой синдром, потому что напряжённые и отёчные мышцы способны сдавить спинномозговые нервы. Риску подвержены в первую очередь те женщины, которые уже имеют проблемы с позвоночником. Лучше перестраховаться и отказаться от ротации корпуса в тренажёре. По крайней мере на начальном этапе тренировок, пока вы не научитесь в полной мере контролировать своё тело и реагировать на его сигналы.
Фото: Shutterstock.com5. Машина Смита
Машину Смита используют новички для приседаний со штангой. С одной стороны, она делает упражнение более безопасным. Потому что благодаря тренажёру нет риска потерять равновесие, упасть и быть придавленным десятками килограммов железа. С другой стороны, она вредит спине. Обычно, когда человек приседает с грузом и поднимается, его движения нелинейные: корпус двигается вперёд и назад, перераспределяя нагрузку на мышцы, способные её выдерживать. Но машина Смита не даёт этого делать. Она позволяет штанге двигаться только по прямой линии. В результате возрастает осевая нагрузка на позвоночный столб.
Фото: Shutterstock.comТренажеры для сведения ног и упражнения для проработки приводящих мышц
Одной из любимейших силовых конструкций девушек по праву считается тренажер для сведения ног сидя. Он создан для проработки приводящих мышц, которые располагаются на внутренней стороне бедер. Упражнение-изолятор делает их более упругими и жесткими. Однако лучше сразу пояснить, что избавиться от ненавистного жира в этих местах путем сведений не получится.
Они, как и любые другие анаэробные нагрузки, например, на тренажере для разведения ног, не способствуют похудению. Их основная цель – укрепление и развитие. Если перед вами стоит задача избавиться от лишнего веса, обязательно включите в программу кардио и следите за питанием.
Участвующие в работе мышцы
Как было сказано выше, нагружаются приводящие или аддукторы. Они являются самыми протяженными мускулами ног и состоят из коротких, длинных и больших. Также во время тренинга задействуются портняжные, идущие вдоль всего бедра, тонкие и гребенчатые. Подтягиваются подвздошно-большеберцовые.
Примечательно, что приводящие относятся к комплексу мышц глубокого залегания поверхности бедер и паха. Их довольно трудно нащупать под другой группой, к примеру, под квадрицепсами. При этом в жизнедеятельности человека они играют важнейшую роль, помогая вставать, подниматься по лестнице, взбираться на гору. Если рассматривать общую картину мышечного массива, аддукторы считаются слабым звеном, требующим серьезного отношения.
Техника выполнения
- Установите на тренажере для сведения бедер необходимый вес посредством навешивания обрезиненных или металлических дисков либо изменения количества плит. Отрегулируйте положение спинки.
- Примите ИП: ноги разведены в стороны и упираются в специальные мягкие подушки. Выпрямитесь и облокотитесь на спинку сиденья.
- Сделайте вдох. На выдохе напрягите бедра и начинайте сводить ноги друг к другу.
- В конечной точке, когда колени прижаты, задержитесь на пару секунд и по максимуму напрягите приводящие.
- Медленно вернитесь в ИП.
- Повторите столько раз, сколько прописано в вашей программе.
Что дает это упражнение?
- Развиваются аддукторы, происходит своего рода «лифтинг» приводящих.
- Укрепляется внутренняя поверхность бедер в целом.
- Улучшается форма области между ног. Линии становятся более плавными и гладкими.
- Увеличивается гибкость суставов.
- Повышается сила и выносливость.
- Снижается риск травмирования, что часто бывает вызвано слабой мускулатурой.
Полезные советы
- Прежде чем приступить к работе в тренажере для сведения ног, необходимо разогреть тазобедренные суставы и потянуть паховые связки. Разминка способствует лучшему восприятию нагрузки и увеличению амплитуды.
- Угол сгибания ног доложен составлять 90 градусов или более и оставаться таким в течение всего подхода.
- Некоторые инструкторы рекомендуют заниматься, изменяя положение спины. Такая система позволяет задействовать разные участки.
- От положения носков тоже зависит смещение акцента. Направляя их наружу или вовнутрь, вы включаете в работу переднюю или заднюю поверхности бедер.
- Следите за спиной – она должна быть ровной. Нельзя горбиться, тем более на завершающем этапе. Если вы почувствовали сильную усталость, сократите кол-во повторений или помогите преодолеть сопротивление с помощью рук.
- Выполняйте упражнение медленно. Избегайте резких движений и придерживайтесь техники.
- Не доводите ноги до стартовой точки. За счет этого мускулы будут находиться в напряжении во время всего подхода, что обеспечит высокую продуктивность.
- Старайтесь задержаться на несколько секунд в конечном положении, напрягая аддукторы. Именно в этот момент увеличивается приток крови к мышцам и, соответственно, сила удержания веса тазобедренным суставом в статике.
- Если вы хотите получить от этого упражнения максимальный эффект, делайте его в рамках суперсетов. Так, «добейте» им ноги после выпадов в стороны с обрезиненными гантелями.
- В случае, когда не получается доделать подход, можно быстро снизить вес и осуществить большее число повторений.
- После завершения тренировки уделите должное внимание растяжке. Помимо роста эффективности, она способствует выводу молочной кислоты из мышц, снижая болезненные ощущения, которые обычно появляются на следующий день.
Противопоказания
Тренажер для сведения/разведения ног не рекомендуется использовать людям, страдающим от проблем с тазобедренным суставом. Стоит воздержаться и тем, у кого болят колени, или случались травмы корпуса и ног. Таким образом, главное противопоказание – патологии суставов.
Помните, что сведение – это не база. Не зацикливайтесь на нем. Оно станет действительно эффективным только в совокупности с основными упражнениями. Но и полностью игнорировать его тоже не стоит.
Тренажер сведение-разведение ног сидя 2 в 1 Avenir AV217/80 с весом 80 кг в Омске
Сведение-разведение ног сидя 2 в 1 80 кг AV217/80
Спортивный тренажёр «Сведение-разведение ног сидя 2 в 1 80 кг AV217/80» входит в группу грузоблочные тренажёры и категорию профессиональных или коммерческих. Он в основном используется в спортивных залах и клубах и применяется для изолированной тренировки мышц внутренней и наружной стороны бёдер. При сведении экстра нагрузку получают подвздошно-поясничная и гребенчатая мышцы, а при разведении — большая ягодичная и напрягатель широкой фасции. Благодаря некоторым особенностям дизайна, а также качеству узлов и материалов, на этой спортивной машине можно интенсивно тренироваться до 12 часов в день.
Особенности тренажёра AV217/80
- AV217/80 в первую очередь состоит из рамы, целиком сваренной из железной прямоугольной в сечении трубы размерами 80х40х3 миллиметра.
К вертикальной части рамы приварена жёсткая конструкция в виде стула с высокой спинкой. - Все мягкие части (сиденье, спинка, опорные подушки) вырезаны из многослойной фанеры и прочного пенополиуретана и обиты добротным кожзаменителем.
- Блок весовой на грузки представляет собой две вертикальные зеркально отполированные направляющие из нержавеющей стали диаметром 25 мм, по которым бесшумно, благодаря поливинилхлоридным втулкам, перемещаются пятнадцать металлических пластин по 5 килограмм каждая. Сквозь все пластины проходит вертикальный металлический шток с отверстиями и при помощи штыревого фиксатора позволяет настраивать вес поднимаемого во время упражнения груза.
- Поскольку это комбинированное устройство, которое предназначено как для сведения, так и для разведения, оно оснащено сложной системой вертикальных и горизонтальных шкивов и копиров, позволяющей легко переключать режим пользования.
- Опорные подушки тоже имеют свой механизм переключения для расположения на наружной или на внутренней стороне бедра.
- Усилие с грузоблока на рабочие рычаги с подушками передаётся при помощи стального троса сечением 5 мм в ПВХ-оболочке.
- На рабочих рычагах для удобства спортсмена имеются покрытые резиной ручки и упоры для стоп.
- Основание тренажёра оснащено стальными опорами из толстой стальной пластины с отверстиями для крепления к полу.
- Металлические детали окрашены полимерной краской.
- Стандартный цвет покрытия черный, при изменении цвета стоимость увеличивается на 5%.
- AV217/80 в первую очередь состоит из рамы, целиком сваренной из железной прямоугольной в сечении трубы размерами 80х40х3 миллиметра.
- Цвет обивки чёрный, красный, синий.
Габариты изделия Д х Ш х В (мм): 1504 x 770 x 1570
Трансп.габариты Д х Ш х В (мм): 1504 x 770 x 1570
Макс.вес пользователя (кг): 180
тренажер для мышц ног
Упражнения для бедер сидя — тренировка для бедер
Попробуйте эти движения нижней части тела, когда вы привязаны к компьютеру … или телевизору.
Корри Пикул
Фото: любезно предоставлено Pure Yoga
The Move: Расширение со скрещенными ногами
Цифра «4» на рисунке 4 в классах Pure Yoga относится к целевым областям тела: прессу, рукам, ягодицам и, конечно же, бедрам.Мэдлин Дэй, креативный координатор рисунка 4, говорит, что вы действительно почувствуете (и увидите) это движение в верхней части бедра — именно там, где заканчивается мини-юбка и обычно начинается неловкость. 1. Сядьте на стул, выпрямите спину и напрягите корпус. Слегка возьмитесь за сиденье стула для поддержки.
2. Скрестите одну ногу над другой в щиколотках. Выдохните и вытяните нижнюю ногу, пока она не станет полностью прямой и параллельной земле.(Верхняя нога также поднимется, но если она будет расслаблена, это позволит ей действовать как «вес» для активной ноги.)
3. Сделайте 5 повторений подъема и опускания, затем задержитесь наверху в течение 10 секунд. Повторить 5 раз.
4. Выпрямите обе ноги и опустите на землю, сделайте паузу, затем перекрестите ногу, положив противоположную ногу сверху. Повторите упражнение с противоположной ногой.
Фото: любезно предоставлено Pure Yoga
Движение: обратный кранч
Это изометрическое упражнение не так уж и много, поэтому оно отлично подходит для тех случаев, когда вы хотите немного улучшить тонус за столом.«Вы также почувствуете это в нижней части пресса», — говорит Дэй из рисунка 4, особенно если вы будете держать спину прямо на протяжении всей последовательности. 1. Сядьте прямо на стуле с нейтральным позвоночником и вытяните ноги перед собой.
2. Положите ладони по обеим сторонам тела на сиденье стула.
3. Сожмите ноги вместе, затем поднимите их так, чтобы ступни зависли на расстоянии одного дюйма от земли, а бедра слегка приподнялись над стулом.
4. Разведите ноги на 2-3 дюйма, затем 15 раз соедините ноги вместе.
5. Отпустите и опустите ноги.
6. Повторений: 5.
Фото: Дженн Зерлинг / JZ Fitness
Движение: приведение сидя / разгибание ног
Этот прием был разработан Дженн Зерлинг, сертифицированным персональным тренером из Лос-Анджелеса и автором книги «Разрыв цепей ожирения» , и его можно выполнять в офисном кресле, в мягком кресле или сидя на краю кровати.«В то время как первичные двигатели являются приводящими мышцами внутренних ног, внешние мышцы ног (включая ягодицы) задействованы и действуют как стабилизаторы ног», — говорит Зерлинг. 1. Возьмите свернутое полотенце или набивной мяч и поместите его между коленями. Убедитесь, что ваши ступни стоят на земле, а колени смотрят вперед. Положите руки по обе стороны бедер.
2. Задействуя основные мышцы, поднимите оба колена примерно на два дюйма к груди.
3. Вытяните обе ноги наружу и сожмите бедра внутрь. Удерживайте сжатие на 3 счета, а затем отпустите.
4. Повторений: 15 (все время держать полотенце или мяч между коленями).
Фото: Дженн Зерлинг / JZ Fitness
Движение: сидящие бриллианты
Пока вы прорабатываете внутреннюю и внешнюю поверхность бедер, почему бы не укрепить мышцы кора, ягодиц, квадрицепсов и подколенных сухожилий? «Это комплексное упражнение нацелено практически на все сразу», — говорит Зерлинг.И единственное необходимое оборудование — стул … и телевизор с заранее записанными эпизодами Scandal , чтобы отвлечь вас от ожога. 1. Сядьте прямо на краю стула. Вытяните ноги перед собой, затем согните ноги в коленях и втяните ступни, прижимая подошвы друг к другу.
2. Держась за края стула, используйте силу кора, чтобы вытянуть колени и пятки по направлению к паху, создавая ногами ромбовидную форму.
3. Сожмите внутреннюю поверхность бедер в верхней части упражнения, а затем вытяните ноги перед собой, не отрывая ступней от земли.
4. Повторений: 15.
Фото: любезно предоставлено Bar Method
The Move: The Bar Method Крендель
Когда приходит время выполнить это убийственное упражнение по подъему снизу на занятиях по барной методике в Нью-Йорке, даже самые худые, сильные, большинство учеников, похожих на Black Swan , выглядят так, будто вот-вот заплачут.Но у людей к кренделям отношения любви-ненависти. Основатель Bar Method Берр Леонард говорит, что он очень популярен — вероятно, потому, что вы так сильно чувствуете его в ягодицах, верхней части бедра и талии, что никак не может работать. 1. Сядьте на мягкий ковер или коврик для упражнений. Опустите правое колено на пол, выровняв его прямо перед правым бедром. Согните правую ногу под углом 90 градусов.
2. Наклоните туловище вправо (вы будете под углом примерно 45 градусов, и большая часть вашего веса будет приходиться на правую руку.Держите пальцы вперед).
3. Отведите левую ногу («рабочую ногу») назад за себя так, чтобы бедро было на одной линии с бедром или немного позади него. Согните это колено на 90 градусов.
4. Поднимите грудь и втяните пресс.
5. Поднимите левую рабочую ногу на дюйм над полом и удерживайте ее примерно 10 секунд. (Держите левое бедро рядом с левым бедром или немного позади него.)
6. Отожмите левую ногу назад (один дюйм) и вперед (один дюйм) 20 раз.
7. Опустите ногу. Поднимите снова. Повторите 10-секундное удержание, а затем 20 нажатий.
8. Повторите последовательность с другой ногой на противоположной стороне.
Next: 5 способов получить плоский живот без хрустов
Опубликовано 11.09.2013
Упражнения для бедер сидя — тренировка для бедер
Попробуйте эти движения нижней части тела, когда вы привязаны к компьютеру…или ваш телевизор.
Корри Пикул
Фото: любезно предоставлено Pure Yoga
1 из 5
The Move: Расширение со скрещенными ногами
Цифра «4» на рисунке 4 в классах Pure Yoga относится к целевым областям тела: прессу, рукам, ягодицам и, конечно же, бедрам.Мэдлин Дэй, креативный координатор рисунка 4, говорит, что вы действительно почувствуете (и увидите) это движение в верхней части бедра — именно там, где заканчивается мини-юбка и обычно начинается неловкость. 1. Сядьте на стул, выпрямите спину и напрягите корпус. Слегка возьмитесь за сиденье стула для поддержки.
2. Скрестите одну ногу над другой в щиколотках. Выдохните и вытяните нижнюю ногу, пока она не станет полностью прямой и параллельной земле.(Верхняя нога также поднимется, но если она будет расслаблена, это позволит ей действовать как «вес» для активной ноги.)
3. Сделайте 5 повторений подъема и опускания, затем задержитесь наверху в течение 10 секунд. Повторить 5 раз.
4. Выпрямите обе ноги и опустите на землю, сделайте паузу, затем перекрестите ногу, положив противоположную ногу сверху. Повторите упражнение с противоположной ногой.
Опубликовано 11.09.2013
Ассимиляция виртуальных ног и восприятие текстуры пола пациентами с полным параличом нижних конечностей, получающими искусственную тактильную обратную связь
Протокол этого исследования был одобрен этическим комитетом AACD (Associação de Assistência à Criança Deficiente, Сан-Паулу, Бразилия) и проводился в соответствии с его руководящие принципы.Все участники предоставили письменное информированное согласие перед включением в исследование.
Все наши пациенты были первоначально оценены с использованием шкалы обесценения Американской ассоциации по травмам позвоночника (ASIA) (модифицированной по классификации Франкеля) для количественной оценки степени тяжести травмы спинного мозга. Эта шкала оценивает SCI от ASIA A — полное поражение без сенсорной или моторной функции ниже неврологического уровня повреждения до E — нормальное сенсорное и моторное функционирование 1 .Семь пациентов с ASIA A и один пациент с ASIA B, все в хронической фазе SCI (по крайней мере, через год после SCI), были выбраны в качестве субъектов для всех описанных здесь экспериментов (см. Таблицу S1 для демографии пациентов). У всех наших пациентов были поражения ниже или равные T4 грудного дерматома. Соответственно, все они показали нормальную сенсомоторную функцию в верхних конечностях.
В течение 6 месяцев были выполнены три различных психофизических эксперимента: тест на псевдопроприоцепцию, кросс-конгруэнтное задание и задание, связанное с моделированием текстур пола.В глобальном масштабе эти эксперименты были разработаны, чтобы: (а) предоставить пациентам иммерсивный визуально-тактильный опыт ходьбы; и (б) оценить влияние усиленной соматосенсорной обратной связи на восприятие пациентами своего тела.
Во время всех экспериментов пациенты сидели в инвалидном кресле в тактильной рубашке (см. Описание Tactile Shirt). Во всех экспериментах пациенты также носили закрепленный на голове дисплей, на котором проецировался трехмерный человеческий аватар. Аватар мог стоять и ходить, и, когда он выполнял эти движения, тактильная обратная связь, воспроизводящая прикосновение ног аватара к земле, передавалась на кожу предплечья пациента посредством использования тактильного дисплея (например.грамм. тактильная рубашка: см. Интеграция аватаров виртуального тела с тактильной рубашкой).
В задаче псевдопроприоцепции мы представили четыре различных парадигмы тактильной обратной связи, имитирующие различные особенности ходьбы аватара, и определили, какая парадигма является наиболее интуитивной для пациентов.
Задача кросс-конгруэнтности (CCT) 15,37 использовалась для исследования границ мозговой репрезентации схемы тела у наших пациентов после того, как они использовали тактильную рубашку.Наконец, моделируя текстуры пола, мы исследовали, могут ли пространственно-временные изменения в моделях тактильной стимуляции предплечья дать пациентам ощущение ходьбы по различным типам поверхностей, таким как трава, песок или асфальтированная улица. Поскольку не существует a priori ответа на вопрос, как стимулировать чье-то предплечье, чтобы воспроизвести сложное ощущение ходьбы по разным поверхностям пола, мы предложили новый подход к поиску лучших вибро-тактильных параметров для визуализации типов пола без каких-либо дополнительных действий. предположение о восприятии пользователя.
Среда виртуальной реальности и ее настройка
Три виртуальных человеческих аватара (одна женщина и двое мужчин) были изменены на основе бесплатных онлайн-моделей от Maximo (Maximo Inc., 2015). Виртуальные аватары были анимированы, чтобы ходить и останавливаться; смешивание анимации выполнялось с помощью MotionBuilder (Autodesk Inc., 2015). Написанный на заказ код C ++ управлял запуском движений аватара, типом поверхности, по которой ходил аватар, и рассчитывал взаимодействие аватара с поверхностью.Кроме того, мы интегрировали монтируемый на голову дисплей Oculus rift (Oculus VR) с MotionBuilder, используя технику под названием OpenGl intercept 51 .
Тактильная рубашка как тактильный дисплей
Для передачи искусственных тактильных и проприоцептивных сигналов обратной связи, исходящих от движений человеческого трехмерного аватара, мы создали тактильный дисплей, встроенный в длинные рукава рубашки. Этот тактильный дисплей был назван «тактильной рубашкой», и в нем использовались вибраторы с эксцентрической массой (ERM) для передачи соматосенсорной обратной связи к коже предплечья пациента.Вибратор ERM состоял из двигателя постоянного тока, вращающего эксцентрическую массу с разными угловыми скоростями, что позволяло генерировать вибрации различной амплитуды и частоты. Частота и амплитуда ERM были связаны, и максимальная амплитуда стимуляции была достигнута примерно на 150–250 Гц, что соответствует максимальной частоте отклика пачинианских корпускул (типа быстро адаптирующихся механорецепторов, чувствительных к механическим переходным процессам и быстрым колебаниям в диапазоне (~ 40–400 Гц)) в волосистой коже человека 52 .В нашей тактильной рубашке использовались три вибратора ERM в форме монеты диаметром 2 см для передачи сенсорной обратной связи, воспроизводящей тактильные или проприоцептивные сигналы ипсилатеральных нижних конечностей, на каждое из предплечий пациентов (рис. 1a). на расстоянии друг от друга вдоль предплечий пациентов по продольной оси локтевой кости (рис. 1а).
Поскольку у всех наших пациентов были поражения грудной клетки (T4-T11), теоретически ни у одного из них не должно быть сенсорных нарушений в предплечьях.Предварительные тесты показали, что 6 из 8 пациентов могли различать положение вибратора с помощью колебаний длительностью 50 мс на предплечьях (рис. S3). Мы решили переместить рубашку на вентральную часть предплечья пациенту P6, у которого возникли трудности с ощущением раздражителей на локтевой кости. У пациента P1 были трудности с распознаванием импульсов вибрации менее 70 мс, поэтому с этим пациентом использовались более длинные последовательности импульсов.
Интеграция виртуальных телесных аватаров с тактильной рубашкой
Во время экспериментов пациенты сидели в инвалидном кресле, надев головной дисплей Oculus Rift (HMD) (Oculus, VR), на котором проецировались виртуальные ноги, имитирующие положение и ориентация собственных тел пациентов (рис.1а). Пациенты также носили наушники, воспроизводящие белый шум, чтобы избежать искажений из-за шума вибраторов. Перед первым экспериментом мы провели два теста с наголовным дисплеем, чтобы оценить, все ли пациенты могут правильно воспринимать виртуальную трехмерную реальность (VR). Мы также оценили, испытывал ли кто-либо из них какие-либо признаки укачивания (рис. S5). Один испытуемый во время второго теста испытал сильную укачивание при быстром движении головой. Таким образом, чтобы иметь единую установку, подходящую для всех пациентов, мы сохраняли фиксированную точку обзора камеры для всех пациентов во время всех экспериментов.
Псевдопроприоцепционный тест
Мы протестировали два различных способа обратной связи, связанных с разными этапами передвижения тела аватара, и оценили, какой из них более интуитивно понятен пациентам для восприятия положения ноги аватара, полагаясь только на тактильную обратную связь: (а) обратная связь. дается во время фазы стойки ног виртуального аватара; (b) обратная связь во время фазы свинга; а также два направления тактильной стимуляции на предплечье: от проксимального к дистальному (PtD) или от дистального к проксимальному (DtP).
Четыре комбинации, заданные двумя модальностями x два направления, были протестированы в отдельных экспериментах (рандомизированный порядок), каждый из которых был разделен на четыре блока (рис. S2a).
Первый блок длился 30 секунд, в течение которых пациенты смотрели на ноги виртуального аватара через HMD. На этом этапе аватар передвигался со средней скоростью 66 шагов в минуту; пациенты не получали тактильной обратной связи на предплечьях. Их попросили посмотреть на ноги аватара и представить себе, что они их собственные.
Второй блок длился 1 минуту и включал доставку тактильной стимуляции на поверхность кожи предплечья, синхронно с походкой аватара и в соответствии с одним из четырех тактильных условий. В третьем блоке HMD был выключен, а аватар продолжал идти с той же скоростью, и тактильная обратная связь была доставлена соответственно. Пациентов просили полагаться на тактильную стимуляцию, воображая, как движутся их собственные ноги. Этот блок длился 30 секунд. После третьего блока аватар перестал ходить, а после 20-секундного перерыва начался последний блок.Здесь испытуемые были проинструктированы сопоставить предстоящую походку аватара, обеспеченную тактильной обратной связью, с соответствующим движением своих рук. Аватар продолжил ходить, сначала со скоростью 66 шагов в минуту. Скорость ходьбы была случайным образом снижена до 50 шагов в минуту или увеличена до 100 шагов в минуту без ведома пользователя и без конкретных временных схем (рис. S2a). Камера снимала руки пациента во время этого упражнения и сравнивала их с положением суставов ног аватара.
Баллы от 0 до 3 давались для оценки работы пациента на каждой скорости. Оценка 0 присваивалась, если движения рук пациента не синхронизировались с походкой аватара на любой фазе с определенной скоростью. Оценка 1 присваивалась, если пациенту удавалось следовать за ходьбой с постоянной скоростью, но не удавалось следовать за ходьбой при изменении скорости ходьбы аватара (например, со средней скорости на высокую). Оценка 2 или 3 давалась, если пациенту удавалось синхронно следовать за аватаром при постоянной и меняющейся скорости.Оценки различались, когда пациенты были синхронны с походкой аватара, но демонстрировали контралатеральную инверсию (например, показывая позицию левой рукой во время стойки правой ноги и наоборот, оценка 2), и когда пациенты были синхронны и использовали правильную руку, чтобы показать правильная нога (оценка 3).
Мы оценили четыре тактильные парадигмы Pi на основе следующей оценки:
Оценка (Pi) = ∑ пациентов, у которых был лучший результат с Pi — Σ пациентов, у которых был худший результат с Pi.В конце каждого теста пациенты отвечали на вопросы анкеты (рис. S2b) и перезапускали новый тест с другой тактильной парадигмой.
Тест перекрестной конгруэнтной задачи (CCT)
Чтобы определить, была ли нога виртуального аватара «встроена» пациентами, мы выполнили адаптированную версию перекрестной конгруэнтной задачи (CCT) 15,18,53 . Эта задача основана на наблюдении, что люди медленнее обнаруживают тактильный раздражитель на указательном пальце, если визуальный отвлекающий фактор появляется рядом с большим пальцем (и наоборот) 54 .Этот эффект, получивший название кросс-модальной интерференции, сильнее, если дистрактор находится на той же руке, что и тактильная стимуляция, чем когда визуальный дистрактор и тактильная стимуляция противоположны. Точно так же после активного использования инструмента мультимодальное взаимодействие между визуальными стимулами на кончике инструмента и тактильной обратной связью на руке пользователя изменяется 55 : зрительные отвлекающие факторы на кончике инструмента приводили к увеличению времени отклика (RT) когда вибрация и дистрактор были неконгруэнтными по сравнению с конгруэнтным случаем.Эти результаты были интерпретированы как раскрытие включения инструмента в качестве продолжения руки субъекта из-за проекции кортикальных зрительных рецептивных полей на дистальный край инструмента.
Пациенты носили тактильную рубашку, наблюдая за трехмерным аватаром через закрепленный на голове дисплей (рис. 2a). Испытание началось с установки креста визуальной фиксации между ступнями аватара на 1000 мс. Затем случайным образом запускалась вибрация продолжительностью 50 мс в одном из четырех мест: проксимальном или дистальном участке левого или правого предплечья.Дистракторы света (трехмерные синие сферы радиусом 3 см) появлялись за 100 мс до механической вибрации в одном из четырех мест: левый / правый палец ноги / пятка ноги аватара (было обнаружено, что смещение 100 мс максимизирует кросс-модальное взаимодействие 56 ). Пациентов просили указать, используя две клавиши на клавиатуре, на переднюю (дистальную) или заднюю (проксимальную) часть предплечья воздействовала вибрация, игнорируя зрительный отвлекающий фактор.
Каждое занятие начиналось с 5-минутной тренировки.Эксперимент начинался только в том случае, если пациенты имели точность определения правильного положения вибрации во время тренировки> 85%. Опыт состоял из 5-минутных блоков CCT, запускаемых сразу после того, как субъекты испытали 1 минуту наблюдения за ходьбой аватара (только визуально, VO), либо с одновременным тактильным откликом, перемещающимся от запястья к локтю предплечья пациента, либо когда ипсилатеральная ступня аватара была в контакте с полом (зрение + тактильная обратная связь, VT) (рис. 2b).
Для каждого блока ЧМТ были протестированы все 16 конфигураций тактильной обратной связи (четыре позиции) и зрительного дистрактора (четыре позиции).На каждом блоке CCT мы повторяли каждую конфигурацию четыре раза. Мы повторили тот же эксперимент для всех пациентов.
Было измерено время отклика (RT), и испытания с RT более 1800 мс или быстрее 200 мс были отброшены, как и испытания с RT за пределами диапазона среднего ± 3 × стандартное значение на (8,5% от общего числа испытаний всех сеансов). ).
Тест имитации текстуры пола
Мы исследовали набор тактильных параметров, которые можно использовать с нашим тактильным дисплеем, чтобы вызвать иллюзию ходьбы по трем различным поверхностям: песок (SAT), трава (GRT) и асфальтированная улица. (ТИХООКЕАНСКОЕ СТАНДАРТНОЕ ВРЕМЯ).Затем мы сравнили параметры, полученные для всех пациентов.
Пациенты сидели в своих инвалидных колясках в тактильной рубашке (см. Рис. 3а) и с дисплеем на голове. Трехмерный человеческий аватар был показан от первого лица. Аватар и виртуальная среда были визуализированы с помощью программного обеспечения MotionBuilder (Autodesk). Ходьба аватара основана на захвате движения здорового человека, идущего со скоростью 45 шагов в минуту.
Мы подарили нашим испытуемым каталог текстур. Пациентов просили выбрать те, которые лучше всего отражали ощущение ходьбы по SAT, GTR и PST.Каталог был создан путем изменения четырех параметров, описывающих тактильную стимуляцию: амплитуда дистального вибратора (DV), амплитуда среднего вибратора (MD), амплитуда проксимального вибратора (PV) и время стимуляции (ST) ( Рис. 3а, б). У каждого из этих четырех факторов было 10 возможных уровней. Таким образом, количество возможных комбинаций составило 10 4 = 10 000. Амплитуда вибратора 1 представляла самое низкое воспринимаемое ощущение, а 10 — самое сильное до сенсорного насыщения (оба найдены эмпирически).
Время стимуляции определялось двумя факторами: длительностью стимула (DoS) и интервалом начала действия стимула (ISOI). ISOI представляет собой время между включением одного вибратора и следующего. DoS был выбран таким образом, чтобы удовлетворять следующему соотношению: DoS = длительность стойки — 2xISOI; где длительность стойки была зафиксирована на 2000 мс на протяжении всего сеанса. ISOI варьировался от 100 мс до 820 мс. Уровень ST 1 относится к самому короткому ISOI и самому длинному DoS (рис. 3d) и соответствует трем длинным вибрациям, передаваемым почти одновременно.Для ST уровня 10 начальная асинхронность была дольше, чем продолжительность стимуляции, что привело к трем коротким и отчетливым вибрациям (не перекрывающимся). Между этими двумя крайностями некоторые уровни ST создают иллюзию непрерывного движущегося прикосновения, известную в тактильных ощущениях как кажущееся движение 16 .
Каждый эксперимент начинался с пациентов, которые сидели перед столом с налобным дисплеем, чтобы наблюдать за трехмерным аватаром, и положили руки на стол (рис. 3a). С помощью толстой ленты очертили на столе две квадратные области размером 50 × 50 см 2 .Пациентов просили держать левую руку внутри левого квадрата, а правую руку — в правом квадрате. Система слежения зафиксировала положение обеих рук в двух контрольных областях, обозначенных двумя квадратами. Когда пациенты перемещали руки над двумя квадратными областями, они получали особый образец тактильной стимуляции, определяемый четырьмя факторами, описанными выше (рис. 3b). В частности, плоские декартовы координаты левой и правой руки были сопоставлены с четырьмя тактильными параметрами.Следовательно, каждому пространственному положению внутри двух квадратов был назначен определенный образец тактильной стимуляции предплечий пациента. Оси были рандомизированы в каждом испытании.
Сессия началась с 15-минутной фазы тренировки. Экспериментатор попросил пациента найти тактильную обратную связь, которая лучше всего представляла бы для него / него ходьбу по песку, траве или асфальтированной улице. Пациенты свободно исследовали 2D-пространства, обозначенные двумя квадратами. Когда они исследовали это виртуальное «тактильное пространство», пациентов просили наблюдать за аватаром, идущим по черному полу.Тактильная обратная связь доставлялась через тактильный дисплей во время фаз стойки аватара на ипсилатеральной руке.
Затем началась исследовательская фаза, на которой одна и та же процедура повторялась 40 раз для каждой поверхности (всего 120 испытаний) в рандомизированном порядке. Чтобы пациенты не узнали положение определенной текстуры на столе, четыре оси на столе были рандомизированы для каждого испытания (четыре возможных конфигурации осей для левой стороны, четыре для правой стороны и все возможные перестановки четырех параметров = 4 × 4. × 4! = 384 возможных конфигурации, рис.3в). Здесь вместо того, чтобы экспериментатор объявлял тип этажа, в начале каждой попытки на 5 секунд в виртуальной среде (VE) появлялся куб: красный для SAT, зеленый для GRT и синий для PST. Для половины испытаний (рандомизированный порядок) сразу после того, как куб исчез из поля зрения, соответствующий пол — песок, трава или мощеная улица — отображался в VE (рис. 3a). В остальной половине испытаний пол оставался черным. У пациентов было 2 минуты, чтобы изучить таблицу (и, следовательно, каталог текстур) и подтвердить, что правильное ощущение было определено, подняв правую руку на 10 см.Задача была такой же при визуальном наличии или отсутствии соответствующего этажа в ВЕ. После подтверждения аватар остановился. Через 2–5 секунд между испытаниями появился новый цветной куб, и началось новое испытание. Испытания были разделены следующим образом: первый блок из 36 испытаний, перерыв 5 минут; второй блок из 36 попыток, перерыв 45 минут; и третий блок из 48 испытаний. Внутри блока всегда было одинаковое количество испытаний с полом и без и одинаковое распределение типов поверхностей.
После того, как фаза исследования была завершена и у пациентов был 20-минутный перерыв, начался следующий этап эксперимента. Экспериментатор воспроизвел на тактильном дисплее, наложенном на предплечья пациентов, 120 текстур, выбранных во время фазы поиска. Пациенты должны были сказать, по какому типу пола ходит аватар, или сказать: «Я не знаю». Пациент держал руку на столе и, используя дисплей, закрепленный на голове, наблюдал, как аватар идет по пустому черному полу. Этот этап получил название обратной задачи.В конце первого сеанса был заполнен опросник:
Q1) Во время эксперимента у меня было впечатление, что я хожу по SAT, GRT, PST.
Q2) Я помню ощущение ног на SAT, GRT, PST.
Два месяца спустя мы провели контрольный эксперимент со всеми пациентами. Пациент наблюдал, как аватар ходил по трем разным этажам в течение 15 минут. Тактильной обратной связи не использовалось. Сессия сопровождалась анкетой, содержащей вопрос Q1 и следующий вопрос:
Q3) Пол типа SAT / GRT / PST, который я видел на головном дисплее, был визуально реалистичным.
(PDF) Влияние 15 недель упражнений на равновесие, силу ног и уменьшение падений у 40 женщин в возрасте от 65 до 89 лет
Справочная информация: По крайней мере, треть людей старше 65 лет, проживающих в сообществах, падают ежегодно. Было обнаружено, что упражнения, нацеленные на баланс, походку и мышечную силу, предотвращают падения у этих людей. Актуальный синтез доказательств важен с учетом основных долгосрочных последствий, связанных с падениями и связанными с ними травмами. ЦЕЛИ: Оценить эффекты (преимущества и вред) физических упражнений для предотвращения падений у пожилых людей, живущих в сообщество.Методы поиска: Мы провели поиск в CENTRAL, MEDLINE, Embase, трех других базах данных и двух регистрах испытаний до 2 мая 2018 года, вместе с проверкой ссылок и контактами с авторами исследований для выявления дополнительных исследований. Критерий выбора: Мы включили рандомизированные контролируемые испытания (РКИ), оценивающие влияние любой формы упражнений в качестве единого вмешательства на падения у людей в возрасте 60+ лет, живущих в сообществе. Мы исключили испытания, посвященные определенным состояниям, таким как инсульт. Сбор и анализ данных: Мы использовали стандартные методологические процедуры, ожидаемые Кокраном.Нашим основным результатом была скорость падений. Основные результаты: Мы включили 108 РКИ с 23 407 участниками, проживающими в общинах в 25 странах. Всего было проведено девять кластерных РКИ. В среднем участники были 76 лет, из них 77% составляли женщины. Большинство испытаний имели неясный или высокий риск систематической ошибки по одному или нескольким пунктам. Результаты четырех исследований, посвященных людям, которые недавно были выписаны из больницы, и результаты сравнения различных упражнений здесь не описаны. Упражнения (все типы) по сравнению с контролем Восемьдесят одно испытание (19 684 участника) сравнивало упражнения (все типы) с контрольными вмешательствами ( один не думал уменьшить падает).Физические упражнения снижают частоту падений на 23% (коэффициент вероятности (RaR) 0,77, 95% доверительный интервал (ДИ) 0,71–0,83; 12 981 участник, 59 исследований; доказательства с высокой степенью достоверности). Основываясь на иллюстративном риске 850 падений на 1000 человек, наблюдаемых в течение одного года (данные основаны на данных о рисках контрольной группы из 59 исследований), это соответствует на 195 (95% ДИ 144–246) падений меньше в группе упражнений. Физические упражнения также сокращают количество людей, испытывающих одно или несколько падений, на 15% (отношение риска (ОР) 0,85, 95% ДИ 0,81 до 0.89; 13 518 участников, 63 исследования; доказательства высокой достоверности). Основываясь на иллюстративном риске в 480 упавших на 1000 человек, наблюдаемых в течение одного года (данные основаны на данных риска контрольной группы из 63 исследований), это соответствует на 72 (95% ДИ 52–91) падению в группе упражнений меньше. Анализ подгрупп не показал доказательств разницы во влиянии на оба исхода падений в зависимости от того, отбирали ли испытания участников с повышенным риском падения или нет. Результаты для других исходов менее определенны, что частично отражает относительно небольшое количество исследований и участников.Упражнения могут уменьшить количество людей, у которых возникает один или несколько переломов, связанных с падением (ОР 0,73, 95% ДИ 0,56–0,95; 4047 участников, 10 исследований; доказательства с низкой степенью достоверности), а также количество людей, перенесших одно или несколько падений, требующих медицинской помощи (ОР 0,61, 95% ДИ 0,47–0,79; 1019 участников, 5 исследований; доказательства с низкой достоверностью). Влияние упражнений на количество людей, которые испытали одно или несколько падений, требующих госпитализации, неясно (ОР 0,78, 95% ДИ от 0,51 до 1,18; 1705 участников, 2 исследования, доказательства с очень низкой достоверностью).Физические упражнения могут мало повлиять на качество жизни, связанное со здоровьем: преобразование объединенного результата (стандартизованная разница средних (SMD) -0,03, 95% ДИ -0,10 до 0,04; 3172 участника, 15 исследований; доказательства с низкой степенью достоверности) в Показатели EQ-5D и SF-36 показали, что соответствующие 95% доверительные интервалы были намного меньше минимально важных различий для обеих шкал. Неблагоприятные события были зарегистрированы в некоторой степени в 27 исследованиях (6019 участников), но тщательно отслеживались как в группах упражнений, так и в контрольной группе только одно испытание.В четырнадцати испытаниях не сообщалось о побочных эффектах. Помимо двух серьезных нежелательных явлений (один стрессовый перелом таза и одна операция по поводу паховой грыжи), о которых сообщалось в одном испытании, остальные были несерьезными нежелательными явлениями, в первую очередь, скелетно-мышечной природы. Среднее значение трех событий (от 1 до 26) в группах упражнений. Разные типы упражнений по сравнению с контролем Разные формы упражнений по-разному влияли на падения (тест на различия в подгруппах, частота падений: P = 0,004, I² = 71%) . По сравнению с контрольными упражнениями на равновесие и функциональными упражнениями частота падений снижается на 24% (RaR 0.76, 95% ДИ от 0,70 до 0,81; 7920 участников, 39 исследований; доказательства с высокой степенью достоверности), а количество людей, испытывающих одно или несколько случаев, снизилось на 13% (ОР 0,87, 95% ДИ от 0,82 до 0,91; 8288 участников, 37 исследований; доказательства с высокой достоверностью). Несколько типов упражнений (чаще всего упражнения на равновесие и функциональные упражнения плюс упражнения с сопротивлением), вероятно, снижают частоту падений на 34% (RaR 0,66, 95% CI от 0,50 до 0,88; 1374 участника, 11 исследований; доказательства со средней степенью достоверности). люди, испытывающие одно или несколько падений на 22% (0.78, 95% ДИ от 0,64 до 0,96; 1623 участника, 17 исследований; доказательства средней достоверности). Тай-чи может снизить частоту падений на 19% (RaR 0,81, 95% CI от 0,67 до 0,99; 2655 участников, 7 исследований; доказательства с низкой степенью достоверности), а также сократить количество людей, которые испытывают падения, на 20% (RR 0,80. , 95% ДИ от 0,70 до 0,91; 2677 участников, 8 исследований; доказательства с высокой достоверностью). Мы не уверены в том, как программы, которые представляют собой в первую очередь тренировки с отягощениями, программы танцев или ходьбы, влияют на частоту падений и количество людей, которые испытывают падения.Ни в одном исследовании не сравнивали упражнения на гибкость или выносливость с контролем. Выводы авторов: Программы физических упражнений снижают частоту падений и количество людей, испытывающих падения, среди пожилых людей, живущих в сообществе (доказательства с высокой степенью достоверности). Влияние таких программ упражнений на другие результаты, не связанные с падениями, является неопределенным. В тех случаях, когда сообщалось, побочные эффекты были преимущественно несерьезными. Программы упражнений, которые уменьшают количество падений, в основном включают упражнения на равновесие и функциональные упражнения, в то время как программы, которые, вероятно, уменьшают количество падений, включают несколько категорий упражнений (обычно баланс и функциональные упражнения плюс упражнения с сопротивлением).Тайцзи также может предотвратить падения, но мы не уверены в том, как упражнения с отягощениями (без баланса и функциональных упражнений), танцы или ходьба влияют на скорость падений.
Стимуляция спинного мозга | Цинциннати, Огайо, Mayfield Brain & Spine
Обзор
Терапия стимуляцией спинного мозга маскирует болевые сигналы до того, как они достигнут головного мозга. Небольшое устройство, похожее на кардиостимулятор, подает электрические импульсы в спинной мозг. Это помогает людям лучше справляться с хронической болью и сокращать употребление опиоидных препаратов.Это может быть вариант, если вы страдаете хронической болью в спине, ногах или руках и не нашли облегчения с помощью других методов лечения.
Что такое стимулятор спинного мозга?
Устройство стимуляции спинного мозга (SCS) хирургическим путем вводится под кожу и посылает слабый электрический ток в спинной мозг (рис. 1). Тонкие провода передают ток от генератора импульсов к нервным волокнам спинного мозга. При включении SCS стимулирует нервы в том месте, где вы чувствуете боль. Боль уменьшается, потому что электрические импульсы изменяют и маскируют сигнал боли, доходящий до вашего мозга.
Рис. 1. Стимулятор спинного мозга маскирует болевые сигналы до того, как они достигнут головного мозга. Стимулятор подает электрические импульсы на электроды, расположенные над спинным мозгом. Изменяемые импульсами, болевые сигналы либо не воспринимаются, либо заменяются ощущением покалывания.Некоторые устройства SCS используют ток низкой частоты для замены болевого ощущения легким покалыванием, называемым парестезией. Другие устройства SCS используют высокочастотные или импульсные импульсы, чтобы замаскировать боль без ощущения покалывания.Настройка без парестезии возможна на большинстве устройств.
Стимуляция не устраняет источник боли. Это просто меняет то, как мозг воспринимает это. В результате степень обезболивания зависит от человека. Целью SCS является снижение боли на 50–70%. Однако даже небольшое уменьшение боли может быть значительным, если оно помогает вам выполнять повседневные дела и снижает количество принимаемых обезболивающих. SCS не улучшает мышечную силу.
Стимуляция не у всех работает.Некоторым это ощущение может показаться неприятным. У других людей может не получиться облегчить всю область боли. По этим причинам пробная стимуляция позволяет вам пробовать ее в течение недели. Если это не сработает, пробные провода можно удалить, не повредив спинной мозг или нервы.
Существует несколько типов систем устройств SCS. Однако все они состоят из трех основных частей:
- Генератор импульсов с батареей, которая создает электрические импульсы.
- Провод отведения с несколькими электродами (8–32), передающий электрические импульсы в спинной мозг.
- Ручной пульт дистанционного управления, который включает и выключает устройство, а также регулирует настройки.
Системы с неперезаряжаемыми батареями необходимо заменять хирургическим путем каждые 2–5 лет, в зависимости от частоты использования. Системы с перезаряжаемыми батареями могут прослужить от 8 до 10 лет или дольше, но вы должны не забывать заряжать систему ежедневно.
Генератор импульсов имеет программируемые настройки. Некоторые устройства SCS способны ощущать изменение положения тела (сидя vs.лежа) и адаптируйте уровень стимуляции к своей активности. В других системах есть отведения, которые можно независимо запрограммировать на покрытие нескольких болезненных участков. Некоторые посылают импульс субвосприятия без покалывания. Ваш врач подберет для вас наиболее подходящий тип системы.
Кто кандидат?
Оценка вашего физического состояния, режима приема лекарств и анамнеза боли определит, подходят ли ваши цели по обезболиванию для SCS. Нейрохирург, физиотерапевт или специалист по боли проверит все предыдущие процедуры и операции.Поскольку хроническая боль также имеет эмоциональные последствия, психолог оценит ваше состояние, чтобы максимально увеличить вероятность успешного исхода.
Пациенты, отобранные для ГКС, обычно более 3 месяцев страдают хронической изнурительной болью в пояснице, ноге (ишиас) или руке. Они также обычно перенесли одну или несколько операций на позвоночнике.
Вы можете быть кандидатом в SCS, если:
- Консервативные методы лечения потерпели неудачу.
- Вам не нужна дополнительная операция.
- Боль вызвана устранимой проблемой и должна быть устранена.
- Вы не хотите дополнительной операции из-за риска или длительного выздоровления. Иногда SCS может быть предпочтительнее для крупных и сложных операций на позвоночнике.
- У вас нет нелеченой депрессии или наркозависимости; их следует лечить до проведения SCS.
- У вас нет медицинских условий, которые мешали бы вам пройти имплантацию.
- Вы успешно прошли испытание SCS.
SCS лучше работает на ранних стадиях хронического заболевания, до того, как будет установлен цикл боль-страдание-инвалидность-боль.
SCS может помочь уменьшить хроническую боль, вызванную:
- Хроническая боль в ноге (ишиас) или руке : постоянная постоянная боль, вызванная артритом, стенозом позвоночника или повреждением нервов.
- Синдром неудачной операции на спине: неудача одной или нескольких операций для облегчения постоянной боли в руке или ноге, но не технический сбой исходной процедуры.
- Комплексный регионарный болевой синдром : прогрессирующее заболевание, при котором пациенты ощущают постоянную хроническую жгучую боль, обычно в стопе или руке.
- Арахноидит: болезненное воспаление и рубцевание защитной оболочки спинномозговых нервов.
- Прочие : боль в культях, стенокардия, заболевание периферических сосудов, рассеянный склероз или травма спинного мозга.
Кто выполняет процедуру?
Нейрохирурги и врачи, специализирующиеся на обезболивании (анестезиолог или физиотерапевт), имплантируют стимуляторы спинного мозга.
Хирургическое решение
Определение того, подойдет ли вам стимулятор спинного мозга, состоит из двух этапов. Во-первых, вы должны пройти временное испытание, чтобы убедиться, что устройство снижает уровень боли.
Этап 1. Пробный «тест-драйв»
Пробная стимуляция — это «тест-драйв», чтобы определить, подойдет ли SCS для данного типа, местоположения и степени тяжести вашей боли. Выполняется в амбулаторных условиях.
Если вы принимаете антикоагулянты, вам необходимо прекратить прием лекарства за 3–7 дней до испытания.
Дается местный анестетик, чтобы обезболить область поясницы. С помощью рентгеноскопии полая игла вводится через кожу в эпидуральное пространство между костью и спинным мозгом. Пробный электрод вставляется и размещается над определенными нервами. Провода присоединяются к внешнему генератору, закрепленному на ремне (рис. 2).
Вас отправят домой с инструкциями по использованию пробного стимулятора и уходу за местом разреза. Ведите письменный журнал настроек стимуляции во время различных занятий и степени обезболивания.Через 4–7 дней вы вернетесь в кабинет врача, чтобы обсудить окончательную имплантацию стимулятора или удаление пробных электродов.
Рис. 2. Во время пробной СКС временные отведения помещаются в позвоночный канал, а стимулятор надевается на пояс. В течение нескольких дней вы будете тестировать устройство, чтобы увидеть, снимает ли оно вашу боль во время различных занятий.Этап 2. Имплант хирургический
Если испытание прошло успешно и вы почувствовали уменьшение боли более чем на 50%, можно назначить операцию по имплантации устройства SCS в ваше тело.
Что происходит перед операцией?
В кабинете врача вы подпишете согласие и другие формы, чтобы хирург знал вашу историю болезни (аллергии, лекарства / витамины, история кровотечений, реакции на анестезию, предыдущие операции). Сообщите своему врачу обо всех лекарствах (безрецептурных, рецептурных, травяных добавках), которые вы принимаете. Предоперационные анализы (например, анализ крови, электрокардиограмма, рентген грудной клетки) могут потребоваться за несколько дней до операции.Проконсультируйтесь с лечащим врачом по поводу прекращения приема некоторых лекарств и убедитесь, что вам разрешена операция.
Продолжайте принимать лекарства, рекомендованные вашим хирургом. Прекратите принимать все нестероидные противовоспалительные препараты (ибупрофен, напроксен и т. Д.) И антикоагулянты (кумадин, аспирин, плавикс и т. Д.) За 7 дней до операции. Прекратите употреблять никотин и алкоголь за 1 неделю до и через 2 недели после операции, чтобы избежать кровотечений и проблем с заживлением.
Перед операцией вас могут попросить вымыть кожу с помощью мыла Hibiclens (CHG) или Dial.Он убивает бактерии и снижает риск инфицирования места хирургического вмешательства. (Избегайте попадания ХГЧ в глаза, уши, нос или гениталии.)
Утро операции
- Не ешьте и не пейте после полуночи перед операцией (если в больнице не указано иное). Вы можете принимать разрешенные лекарства, запивая небольшим глотком воды.
- Примите душ с антибактериальным мылом. Надевайте свежевыстиранную свободную одежду.
- Носите обувь на плоской подошве с закрытой спинкой.
- Удаление макияжа, заколок, контактных линз, пирсинга, лака для ногтей и т. Д.
- Оставьте дома все ценные вещи и украшения (включая обручальные кольца).
- Принесите список лекарств (рецептурных, безрецептурных и травяных добавок) с указанием обычно принимаемых доз и времени суток.
- Принесите список аллергии на лекарства или продукты.
Прибытие в больницу за 2 часа до запланированного времени операции (за 1 час в амбулаторном хирургическом центре), чтобы заполнить необходимые документы и пройти предоперационные осмотры.Анестезиолог поговорит с вами и объяснит эффекты анестезии и связанные с ней риски. В руку введут внутривенную (IV) трубку.
Что происходит во время операции?
Операция обычно длится 1-2 часа.
Шаг 1: подготовьте пациента
Вы лягте животом на стол и вам дадут легкую анестезию. Затем подготавливаются участки спины и ягодиц, куда будут помещены отведения и генератор.
Шаг 2: размещение электродов
Электроды вводятся с помощью рентгеноскопии (разновидность рентгеновского излучения).В середине спины делается небольшой разрез кожи (рис. 3) и обнажается костный позвонок.
Часть костной дуги удаляется (ламинотомия), чтобы освободить место для размещения электродов. Отведения располагаются в эпидуральном пространстве над спинным мозгом и фиксируются швами (рис. 4). Отведения не касаются напрямую спинного мозга.
Рисунок 4A. В кости разрезают ламинотомию, чтобы освободить место для введения электродов в позвоночный канал.B. Отведения расположены в эпидуральном пространстве над спинным мозгом для подачи электрического тока к нервам.
Шаг 3: тестовая стимуляция (необязательно)
В зависимости от имплантируемого устройства SCS вас могут разбудить, чтобы помочь врачу проверить, насколько хорошо стимуляция покрывает ваши болевые области. Однако современные отведения устройства SCS могут быть расположены на основе анатомии или электрического мониторинга нервов.Настройки из испытания будут использоваться для программирования генератора импульсов в конце операции, поэтому ваш отзыв важен для обеспечения наилучшего обезболивания.
В некоторых случаях, если электроды, имплантированные во время исследования, расположены идеально, нет необходимости изменять их положение или вставлять новые электроды.
Шаг 4. Туннелирование провода
Когда электроды отведений установлены, провод проходит под кожей от позвоночника к ягодице, где будет имплантирован генератор.
Шаг 5. Поместите генератор импульсов
Делается небольшой разрез кожи ниже талии. Хирург создает под кожей карман для генератора (рис. 5). Выводной провод прикреплен к генератору импульсов. После этого генератор правильно помещается в кожный карман.
Шаг 6. Закройте надрезы
Надрезы зашивают швами и кожным клеем.Применяется повязка.
Что происходит после операции?
Вы проснетесь в зоне восстановления. Ваше кровяное давление, частота сердечных сокращений и дыхание будут контролироваться, и ваша боль будет устранена. Большинство пациентов выписываются домой в тот же день или на следующее утро. Генератор импульсов будет запрограммирован перед вашим отъездом. Вам будут даны письменные инструкции, которым вы должны следовать, когда вернетесь домой.
Следуйте инструкциям хирурга по уходу на дому через 2 недели после операции или до следующего визита.В целом можно ожидать:
Ограничения
Не сгибайте, не поднимайте, не поворачивайте спину и не тянитесь над головой в течение следующих 6 недель. Это необходимо для предотвращения смещения выводов до заживления.
- Не поднимайте ничего тяжелее 5 фунтов.
- Отсутствие напряженной деятельности, включая работу во дворе, работу по дому и секс.
- Не садитесь за руль до следующего визита.
- Не употребляйте алкоголь.Он разжижает кровь и увеличивает риск кровотечения. Также не смешивайте алкоголь с обезболивающими.
Уход за разрезом
- Тщательно мойте руки до и после очистки разреза, чтобы предотвратить заражение.
- Вы можете принять душ на следующий день после операции.
- Ежедневно осторожно промывайте разрез, покрытый клеем для кожи Dermabond, водой с мылом. Не трите и не ковыряйте клей.Пэт насухо.
- Не замачивайте разрез в ванне или бассейне.
- Не наносите лосьон / мазь на разрез.
- Если есть дренаж, накройте разрез сухой марлевой повязкой. Если дренаж просачивается через две или более повязки в день, позвоните в офис.
- Чистый розоватый сток из разреза — это нормально. Следите за увеличением объема дренажа или распространением покраснения. Инфицированный разрез может иметь цветной дренаж и начать отделяться.
Лекарства
- Примите обезболивающее по указанию хирурга. По мере уменьшения боли уменьшайте количество и частоту. Если вам не нужно обезболивающее, не принимайте его.
- Наркотики могут вызвать запор. Пейте много воды и ешьте продукты с высоким содержанием клетчатки. Размягчители стула и слабительные средства могут помочь при опорожнении кишечника. Колас, Сенокот, Дулколакс и Миралакс продаются без рецепта.
Деятельность
- Заморозьте разрез 3-4 раза в день в течение 15-20 минут, чтобы уменьшить боль и отек.
- Не сидите и не лежите в одном положении дольше часа, если вы не спите. Скованность ведет к еще большей боли.
- Спинальные головные боли могут быть вызваны утечкой спинномозговой жидкости вокруг места отведения. Утечка часто проходит сама по себе. Лягте ровно и пейте много негазированных жидкостей с кофеином (чай, кофе).
- Вставайте и ходите 5-10 минут каждые 3-4 часа. Постепенно увеличивайте ходьбу, насколько это возможно.
Когда звонить врачу
- Лихорадка выше 101.5 ° F (без эффекта Тайленола)
- Тошнота или рвота без симптомов.
- Сильная неизлечимая боль.
- Признаки инфекции разреза.
- Сыпь или зуд в месте разреза (аллергия на кожный клей Dermabond).
- Припухлость и болезненность голени на одной ноге (признак тромба).
- Новое начало покалывания, онемения или слабости в руках или ногах.
- Головокружение, спутанность сознания, тошнота или чрезмерная сонливость.
- Жидкость может накапливаться под кожей вокруг электродов или устройства, вызывая видимую опухоль (серому). Если это произойдет, обратитесь к врачу.
- Внезапная сильная боль в спине, внезапная слабость и спазм в ногах, потеря функции мочевого пузыря и / или кишечника — это экстренная ситуация — Сходите в больницу и вызовите своего хирурга.
Восстановление
Примерно через 10 дней после операции вы придете в офис, чтобы проверить разрез.Принесите пульт дистанционного управления для устройства и коробку с продуктом на прием к хирургу. При необходимости в это время можно изменить программирование генератора импульсов. Важно работать с врачом, чтобы скорректировать лекарства и уточнить программирование стимулятора.
Ваш специалист по боли и представитель устройства будут работать с вами над точной настройкой SCS.
Какие результаты?
Результаты SCS зависят от тщательного отбора пациентов, успешной пробной стимуляции, правильной хирургической техники и обучения пациентов.Стимуляция не излечивает состояние, вызывающее боль. Скорее, это помогает пациентам справиться с болью. СКС считается успешным, если боль уменьшилась хотя бы наполовину.
Опубликованные исследования стимуляции спинного мозга показывают хорошее или отличное долгосрочное облегчение у 50-80% пациентов, страдающих хронической болью [1-6]. В одном исследовании сообщается, что у 24% пациентов улучшилось состояние, достаточное для того, чтобы вернуться к оплачиваемой работе или работе по дому только с помощью стимуляции или с добавлением время от времени пероральных обезболивающих [7].
СКС терапия обратима. Если пациент решит в любой момент прекратить лечение, электродные провода и генератор могут быть удалены.
Каковы риски?
Ни одна операция не обходится без риска. Общие осложнения любой операции включают кровотечение, инфекцию, образование тромбов и реакции на анестезию. Специфические осложнения, связанные с SCS, могут включать:
- Нежелательные изменения в стимуляции (могут быть связаны с клеточными изменениями в ткани вокруг электродов, изменениями положения электродов, ослаблением электрических соединений и / или выходом из строя электрода)
- Эпидуральное кровотечение, гематома, инфекция, сдавление спинного мозга и / или паралич (могут быть вызваны введением электрода в эпидуральное пространство во время хирургической процедуры)
- Отказ аккумулятора и / или утечка аккумулятора
- Утечка спинномозговой жидкости
- Постоянная боль в области электрода или стимулятора
- Карман прозрачной жидкости (серома) в месте имплантации.Серомы обычно исчезают сами по себе, но может потребоваться дренаж.
- Миграция свинца, которая может привести к изменению стимуляции и уменьшению обезболивания
- Аллергическая реакция на материалы имплантатов
- Миграция генератора и / или местная эрозия кожи
- Паралич, слабость, неуклюжесть, онемение или боль ниже уровня имплантации
Состояния, при которых вам может потребоваться дополнительная операция, включают перемещение электрода, разрыв электрода или удлинительного провода или (в редких случаях) механический отказ устройства.Причины удаления устройства включают инфекцию и отсутствие боли.
Иногда вокруг электрода образуется рубцовая ткань, что снижает эффективность стимуляции.
Жизнь со стимулятором
После программирования SCS вас отправляют домой с инструкциями по регулированию стимуляции путем контроля силы и продолжительности каждого периода стимуляции. При необходимости ваш врач может изменить ширину, амплитуду и частоту пульса при последующих посещениях.
Генератор импульсов имеет программируемые настройки:
- Частота (скорость): количество стимуляций в секунду. Слишком мало импульсов не вызывает ощущений. Слишком много приводит к стиральной доске или ухабистому эффекту.
- Ширина импульса: область воздействия стимуляции.
- Амплитуда импульса: определяет порог восприятия боли.
Ручной программатор позволяет включать и выключать стимулятор, выбирать программы и регулировать силу стимуляции.Большинству людей назначают несколько программ для достижения максимального облегчения боли в любой момент в течение дня или во время определенных занятий. При необходимости вы можете использовать стимулятор спинного мозга круглосуточно.
Некоторые люди чувствуют разницу в интенсивности стимуляции в зависимости от своего положения (например, сидя или стоя). Это вызвано колебаниями в распространении электричества при смене положения и является нормальным явлением.
Как и кардиостимулятор, ваш стимулятор не может быть поврежден такими устройствами, как сотовые телефоны, пейджеры, микроволновые печи, защитные двери и датчики защиты от краж.Обязательно имейте при себе идентификационную карту имплантированного устройства во время полета, поскольку устройство обнаруживается у ворот службы безопасности аэропорта. Ворота безопасности универмагов и аэропортов или детекторы кражи могут вызвать усиление или уменьшение стимуляции при прохождении через ворота. Это ощущение временное и не должно навредить вашей системе. Однако в качестве меры предосторожности вам следует выключить систему, прежде чем проходить через ворота безопасности.
Различные системы SCS имеют разные ограничения на использование с МРТ, ультразвуком, дефибриллятором, электрокаутерией, диатермией и кардиостимуляторами.Обязательно ознакомьтесь с ограничениями вашего конкретного устройства SCS. Кроме того, мануальная терапия может привести к смещению электрода. Сначала посоветуйтесь со своим хирургом.
Источники и ссылки
Если у вас есть дополнительные вопросы, свяжитесь с Mayfield Brain & Spine по телефону 800-325-7787 или 513-221-1100.
Источники
- Verrills P, Sinclair C, Barnard A. Обзор систем стимуляции спинного мозга при хронической боли. J Pain Res 9: 481-92, 2016
- Де ла крус П., Фама С., Рот С. и др.Предикторы успеха стимуляции спинного мозга. Нейромодуляция 18 (7): 599-602, 2015
- Грайдер Дж., Манчиканти Л., Караяннопулос А. и др. Эффективность стимуляции спинного мозга при хронической боли в спине: систематический обзор. Врач боли 19: E33-E54, 2016
- Deer TR, Skaribas IM, Haider N, et al. Эффективность стимуляции шейного отдела спинного мозга для лечения хронической боли. Нейромодуляция 17 (3): 265-71, 2014
- Deer TR, Mekhail N, Provenzano D, et al.Надлежащее использование нейростимуляции спинного мозга и периферической нервной системы для лечения хронической боли и ишемических заболеваний: Комитет консенсуса по приемлемости нейромодуляции. Нейромодуляция 17 (6): 515-50, 2014
- Eldabe S, Buchser E, Duarte RV. Осложнения методов стимуляции спинного мозга и периферических нервов: обзор литературы. Pain Med 17 (2): 325-36, 2016
- Сундарадж С.Р. и др.: Стимуляция спинного мозга: семилетний аудит.J Clin Neurosci 12: 264-270, 2005
Ссылки
Spine-health.com
Nevro.com
Controlyourpain.com
Tamethepain.com
Poweroveryourpain.com
Глоссарий
ламинотомия: хирургическое рассечение пластинок или позвоночной дуги.
отведение: небольшой медицинский провод с силиконовым покрытием с электродами на одном конце. Электрический ток проходит от батареи по проводу к электродам.Два типа: чрескожные и хирургические отведения.
рентгеноскопия: устройство визуализации, которое использует рентгеновское или другое излучение для просмотра структур тела в реальном времени или «вживую». Также называется С-образным рычагом.
чрескожно: через кожу (например, путем инъекции).
стимуляция периферических нервов: хирургическое лечение боли, при котором стимулируются определенные нервы, а не общая область спинного мозга.
седалищный нерв: нерв, расположенный в задней части голени, который снабжает мышцы задней части колена и голени и обеспечивает чувствительность задней части бедра, части голени и подошвы стопы.
ишиас: боль, проходящая вдоль седалищного нерва в ягодицах и вниз по ногам. Обычно вызвано сдавлением 5-го поясничного спинномозгового нерва.
серома: масса, образованная скоплением тканевых жидкостей после раны или хирургического вмешательства.
спинномозговая гигрома: скопление спинномозговой жидкости под кожей, которое вызывает видимый отек, вызванный утечкой вокруг катетера, дренажа или шунта.
обновлено> 1.2021
рассмотрено> Танн Николс, доктор медицины, Джордж Мендибур, доктор медицины, Марк Орландо, доктор медицины, клиника Мэйфилд, Цинциннати, Огайо
Сертифицированная медицинская информация Mayfield материалов написаны и разработаны клиникой Mayfield Clinic. Мы соблюдаем стандарт HONcode в отношении достоверной информации о здоровье.Эта информация не предназначена для замены медицинских рекомендаций вашего поставщика медицинских услуг.
Двухсуставный пассивный экзокостюм для поддержания баланса может снизить метаболические затраты при ходьбе.
Среди различных человеческих походок ходьба является наиболее частым занятием в нашей повседневной жизни, поскольку люди в среднем проходят около 10000 шагов в день [1]. Поэтому разработка вспомогательных устройств для поддержки ходьбы человека становится все более популярной темой исследований в области робототехники, биомеханики и реабилитации.Роботизированные устройства для помощи при ходьбе можно разделить на ортезы [2], протезы [3] и экзоскелеты [4]. Экзоскелеты нижних конечностей в основном используются для трех типов приложений [5]: (i) реабилитация пациентов с ограниченными возможностями опорно-двигательного аппарата [6–8], (ii) поддержка пациентов с утраченной подвижностью в нижних конечностях [9, 10] и ( iii) улучшение способностей здоровых людей за счет снижения энергопотребления и повышения устойчивости к возмущениям во время ходьбы [11, 12]. В этой статье мы обращаемся к последней группе, которая концентрируется на снижении метаболических затрат на транспорт.
Вспомогательные устройства для снижения метаболизма предназначены для работы в активном (под напряжением) или пассивном режиме. Исследования экзоскелетов в основном сосредоточены на активных устройствах, поскольку они могут повысить устойчивость передвижения, что имеет решающее значение для людей с ограниченными возможностями или пожилых людей, а инжекция энергии от исполнительных механизмов может привести к значительному снижению метаболических затрат на движение здоровых людей [13]. Например, Quinlivan и др. продемонстрировали монотонную связь между уровнем помощи (пиковым моментом голеностопного сустава) и чистым снижением скорости метаболизма в их экзокостюме [14].В 2016 году Муни и Херр разработали экзоскелет голеностопного сустава с электроприводом, который может снизить метаболические затраты при ходьбе на 11,4% [15]. В том же году Сео и др. сконструировали экзоскелет бедра для пожилых людей, который может снизить потребление энергии при ходьбе на 13% [16]. Значительное улучшение в снижении метаболических затрат было достигнуто с помощью метода оптимизации «человек в петле» [13, 17]. С помощью этого метода, использующего обратную связь по скорости метаболизма и байесовскую оптимизацию, потребление энергии при ходьбе было снижено на 24.2 7,4% [13]. Недавно Ким и соавторы разработали экзокостюм, который может снизить метаболические затраты как при беге, так и при ходьбе [18].
В пассивных устройствах снижение метаболизма может быть достигнуто за счет переключения энергии между различными суставами [19, 20] или сохранения и отдачи энергии одного и того же сустава в течение цикла походки [21]. В связи с этим без инжекции энергии в пассивных устройствах повышение эффективности ходьбы — что уже является эффективным видом деятельности из-за эволюции в течение тысяч лет — является более сложной задачей, чем в активных устройствах.Однако пассивные устройства обладают такими преимуществами, как меньшие затраты на техническое обслуживание, легкость и экономичность, поскольку они не имеют исполнительных механизмов, батарей, электронных плат или датчиков [21]. В 2015 году Коллинз и др. разработали пассивный эластичный экзоскелет голеностопного сустава, работающий параллельно с икроножными мышцами, который может снизить метаболические затраты при ходьбе на 7,2–2,6% за счет поддержки отталкивания [21]. Совсем недавно Насири и др. продемонстрировали, что передача энергии между двумя ногами в их экзоскелете без питания может снизить потребление энергии при беге примерно на 8% [19].
За последние несколько лет внимание исследователей привлекло снижение метаболических затрат за счет поиска оптимального момента в суставах и контроля положительной и отрицательной работы в определенных суставах [13, 21–23]. Однако это не единственный способ поддерживать походку человека. Понимание биомеханики передвижения человека может помочь в разработке вспомогательных устройств. В наших предыдущих исследованиях мы обнаружили потенциал использования постурального контроля и двусуставных мышц для поддержки ходьбы человека, что также может привести к снижению метаболических затрат [24, 25].В [26] мы предложили новый подход к созданию вспомогательных устройств для нижних конечностей и управлению ими. Основываясь на концепции VPP (virtual pivot point) [27] как метода биоинспирированного контроля позы, сила реакции опоры (GRF) использовалась для модуляции жесткости двухсуставной пружины, параллельной мышце задней поверхности бедра человека (HAM) [26]. . Поддержка походки с помощью этого метода FMCH (податливое бедро с модулированной силой) может снизить метаболические затраты при ходьбе на 12% в нейромышечной модели ходьбы человека [28]. Использование обратной связи по силе ног для настройки жесткости двухсуставной пружины может быть реализовано как в активном, так и в квазипассивном экзоскелете (см. Пример квазипассивного экзокостюма в [29]).В этой статье цель состоит в том, чтобы представить такой биоинспектируемый дизайн пассивного экзокостюма. В этом отношении мы расширяем предыдущий метод в различных аспектах: (1) контроль : представляет концепцию управления LMCH (податливое бедро с модулированной длиной), в которой обратная связь по силе ног (GRF) для регулировки жесткости двусуставных (искусственных) мышц является заменено обратной связью по длине ног, (2) нейромышечных симуляций: представляет и тестирует пассивную версию экзокостюма на основе FMCH, (3) эксперименты: (а) тестирует эффекты пассивных двусуставных пружин без какой-либо обратной связи (б ) добавление второй двухсуставной пружины, имитирующей прямую мышцу бедра (RF) в ногах человека.(4) Реализация : представляет механизм пассивной реализации обратной связи по длине. Метод LMCH основан на приближении поведения ног человека с помощью пружины при разных походках [30, 31]. Результаты моделирования продемонстрировали наличие VPP и снижение метаболических затрат при ходьбе на 10%. Кроме того, наши эксперименты демонстрируют, что значительного снижения метаболических затрат можно достичь путем добавления соответствующих двухсуставных пружин в пассивную конструкцию.
Эффективность и производительность экзоскелетов зависят от принципов механической конструкции, архитектуры управления и взаимодействия между роботом и человеческим телом.В этом отношении моделирование походки человека может играть важную роль в прогнозировании реакций человека на внешние силы (крутящие моменты) и, следовательно, в проектировании вспомогательных роботов и управлении ими. При моделировании походки человека можно учитывать различные уровни детализации. Один из методов упрощения понимания передвижения человека был предложен концепцией локомоторных подфункций (т. Е. Стойки, поворота и равновесия) [32]. Мы считаем, что такое абстрактное представление, а также шаблон и концепция якоря [33] являются полезными подходами для понимания основных принципов биологического передвижения на ногах, а затем для проектирования вспомогательных устройств и управления ими.Поэтому в этом разделе сначала мы представляем моделирование на основе шаблонов, используемое для проектирования и управления нашим экзокостюмом. Мы представляем метод LMCH (податливое бедро с модулированной длиной) в качестве эталонной модели для балансировки как одной из подфункций опорно-двигательного аппарата. Подфункция баланса выбрана потому, что для нее может потребоваться большая поддержка со стороны вспомогательного устройства по сравнению с двумя другими подфункциями у здоровых субъектов. Затем мы описываем помощь при ходьбе на основе шаблонной модели и то, как мы применяем метод LMCH для создания нашего экзокостюма.Реализация разработанного экзокостюма в нейромышечной модели Гейера и Херра [28] используется для оценки его эффективности в снижении метаболических затрат при ходьбе человека. Наконец, мы описываем наш недавно разработанный пассивный экзокостюм с двухсуставными пружинами бедра. Уровень поддержки этой системы описывается экспериментальными результатами. Это устройство — первый шаг к разработке экзокостюма на основе LMCH. В приложении представлен простой механизм физической реализации обратной связи по длине для настройки жесткости двухсуставных мышц.
2.1. Подход к моделированию
В этом разделе мы кратко представляем моделирование на основе шаблонов для двуногой ходьбы с акцентом на подфункцию опорно-двигательного аппарата равновесия. Эти подходы описывают основные концепции для разработки наших вспомогательных устройств (например, в [25, 26]). Сначала обсуждается модель SLIP (подпружиненный перевернутый маятник) и линейная зависимость между силой ноги и виртуальной длиной ноги как ключевой момент в конструкции экзоскелета на основе LMCH. Затем объясняются модели VPP (виртуальная точка поворота) и FMCH (податливое бедро с модулированной силой) для прогнозирования контроля осанки при походке человека, что является основной концепцией помощи при ходьбе в этой статье.Расширение этих шаблонных моделей для создания экзокостюма описано в разделе 2.2.
2.1.1. Шаблонные модели
Шаблонные модели — это абстрактные представления сложных систем, описывающих основные характеристики передвижения [33]. Из-за своей простоты и адекватности для представления сложных форм поведения шаблоны считаются полезными инструментами при изучении передвижения на ногах. Подпружиненный перевернутый маятник (SLIP) — одна из самых известных шаблонных моделей, используемых при изучении движения на ногах [30, 34].Эта модель разработана на основе линейной зависимости силы от длины опорной ноги, наблюдаемой при различных походках [31, 35]. В модели SLIP тело моделируется точечной массой в центре масс, а нога моделируется как безмассовая линейная пружина, как показано на рисунке 1 (а). Пружина расположена между центром масс (CoM) и центром давления (CoP) стопы. Показано, что эта модель полезна для объяснения характеристик походки, таких как паттерн GRF и смещение CoM при прыжках [30], беге [36] и ходьбе [31].Модель SLIP является основным элементом нашего моделирования. Однако пружинно-массовый механизм в модели SLIP может главным образом объяснять подфункцию опорно-двигательного аппарата в походках человека, но для других подфункций, таких как качание или баланс, он нуждается в дальнейшем расширении [37, 38].
Увеличить Уменьшить Сбросить размер изображения
Рис. 1. Моделирование на основе шаблона для разработки экзокостюма. (а) Модель SLIP: точечная масса в CoM тела на вершине двух безмассовых пружин между CoM и CoP каждой ступни.(b) Модель FMCH: податливое бедро с модулированной силой, приложенное к модели на основе SLIP, расширило жесткий ствол, называемый TSLIP. (c) Реализация устройства помощи при ходьбе на основе FMCH с помощью переменной двухсуставной пружины. (d) Устройство помощи при ходьбе на основе LMCH. Изменения длины ножек обеспечивают обратную связь через кабель к податливому механизму для регулировки жесткости двухсуставных пружин.
Загрузить рисунок:
Стандартный образ Изображение высокого разрешения2.1.2. Модель VPP для контроля осанки человека
Эволюция от четвероногого к двуногому движению, хотя и считается великой эволюцией у людей, создает проблему контроля осанки.Первым шагом к решению этой проблемы является изучение шаблонных моделей двуногих, которые по своей сути могут представлять баланс верхней части тела. Для этого модель SLIP была расширена за счет включения жесткого ствола. Эта модель известна как TSLIP [39]. Таким образом, вертикальное положение, которое играет ключевую роль в стабилизации движения человека, может быть предсказано с помощью шаблонных моделей. Метод, объясняющий вертикальную осанку у людей, — это виртуальная точка поворота (VPP), предложенная в [27]. Согласно этой концепции, люди намерены держать верхнюю часть тела вертикально во время ходьбы.Анализ ходьбы человека в сагиттальной плоскости показывает, что силы реакции земли (GRF) пересекаются в точке (называемой VPP) над центром масс. Перенаправление GRF через эту виртуальную точку поворота может воспроизвести колебательное движение виртуального маятника с сосредоточенной массой в CoM, свисающей с VPP [27]. Этот виртуальный маятник может прогнозировать контроль осанки человека во время ходьбы. Показано, что в модели TSLIP необходимый крутящий момент в тазобедренном суставе для установления VPP и достижения стабильной ходьбы рассчитывается следующим образом.
где F s , l и d h — сила ноги, длина ноги, расстояние между VPP и CoM и расстояние между CoM и тазобедренным суставом, соответственно.Кроме того, и, соответственно, обозначают угол между туловищем и виртуальной ногой (линия между бедром и CoP) и угол между осью тела и вектором от CoM к VPP, как показано на рисунке 1 (b).
2.1.3. Модель FMCH
Эта биомеханическая модель бедра с модуляцией силы была введена для физического воплощения концепции VPP в беге [40] и ходьбе [41]. В этой биоинспирированной модели считается, что переменная пружина между ногой и верхней частью тела создает крутящий момент в бедре (см. Рисунок 1 (b)).Жесткость этой пружины регулируется обратной связью по усилию ног.
где W « k и — вес тела, нормализованная сила ноги, жесткость бедренной пружины и угол покоя, соответственно. Разделив F s на W для определения нормализованной силы ноги (как показано на рисунке 2), единицы измерения согласованы. Было показано, что эта модель обеспечивает точное приближение крутящего момента VPP (с ошибкой менее 2%) [41]. В модели FMCH, как и в модели VPP, нам не нужно измерять угол ствола по отношению к земле, чтобы удерживать тело в вертикальном положении.Кроме того, поскольку механизм переменной жесткости по сути обеспечивает крутящий момент, пропорциональный углу, нам не нужно измерять угол между верхней частью тела и виртуальной ногой в методе FMCH. Заменив пружину на модель мышц типа Хилла [42], Давуди и др. продемонстрировали, что модель FMCH совместима с мышечной системой человека и может прогнозировать человеческое равновесие с помощью нейромышечного моделирования [43].
Увеличить Уменьшить Сбросить размер изображения
Рисунок 2. Кривая зависимости силы ноги от виртуальной длины ноги при ходьбе человека. Эти экспериментальные данные (взятые из [35]) были собраны у 21 здорового субъекта при 75% PTS (предпочтительной скорости перехода).
Загрузить рисунок:
Стандартный образ Изображение высокого разрешения2.2. Помощь при походке на основе модели
В этом разделе мы сначала расширяем концепцию FMCH, чтобы ее можно было применить для помощи при походке. Для этого мы объясняем расширение модели FMCH до сегментированного механизма. Это расширение обеспечивает инфраструктуру экзокостюма для поддержки двусуставных мышц бедра, чтобы снизить метаболические затраты при ходьбе.Далее мы обсудим реализацию замены силы ног на обратную связь по длине ног в пассивном экзокостюме.
2.2.1. Помощь при ходьбе на основе FMCH
Как упоминалось ранее, FMCH представляет модель ходьбы человека, состоящую из двух виртуальных тазобедренных пружин и двух виртуальных ног, соединенных с туловищем. Стоит отметить, что эта так называемая виртуальная бедренная пружина напоминает человеческие двусуставные мышцы (такие как подколенное сухожилие (HAM)), если соотношение плеч рычага бедра и колена отрегулировано должным образом [44].В нашей предыдущей конструкции экзокостюма [26] двухсуставной привод, расположенный параллельно двухсуставной мышце HAM для контроля положения верхней части тела, считался имитирующим поведение регулируемой пружины. В дальнейшем мы назовем эту регулируемую параллельную пружину усиленной пружиной (AS) . Жесткость этой пружины (аналогично пружинам виртуального бедра в FMCH) регулируется обратной связью по силе ног. Таким образом, сила, создаваемая дополнительной пружиной, может быть записана как:
в котором l AS и l AS 0 — длина увеличенной пружины и длина покоя соответственно.Здесь k a и l AS 0 могут определять амплитуду и ширину вспомогательной силы соответственно. Таким образом, эти параметры рассматриваются как параметры настройки, чтобы найти оптимальную схему вспомогательной силы.
В двухсуставной конфигурации, показанной на рисунке 1 (c), изменение длины пружины может быть рассчитано на основе отклонения угла колена () и угла бедра () от положения покоя (когда пружина не создает силы), следующим образом,
где r k и r h — рычаги коленного и тазобедренного суставов соответственно (см. рисунок 1 (c)).
В [26] мы показали, что при установке соотношения плеч рычага бедра и колена на 2, увеличенная длина пружины изменяется () будет пропорциональна виртуальному изменению угла бедра ()
Это означает, что модель с сегментированной ногой и двухсуставными пружинами, регулируемыми силой ноги, имитирует управление тазобедренным суставом FMCH, заданное уравнением (2). Это соотношение получается из-за наличия сегментов бедра и голени одинаковой длины. Следовательно, путем установки двухсуставного привода, включающего коленные и тазобедренные суставы (с соотношением плеч рычага бедра и колена, равным (2)), вспомогательное устройство, основанное на концепции FMCH, может быть реализовано.
2.2.2. Помощь при ходьбе на основе LMCH
Изучая динамическое поведение человека при ходьбе, можно выяснить, что соотношение между силой ноги и виртуальной длиной ноги можно рассматривать как линейную функцию. На рисунке 2 показана виртуальная кривая силы-длины ноги при ходьбе человека с нормальной скоростью 75% PTS 3 на основе экспериментальных данных на людях [35]. Эти данные были получены при ходьбе по беговой дорожке 21 здорового человека (11 женщин, 10 мужчин, возраст: 22–28 лет, рост: 1).64–1,82 м, вес: 59,2–82,6 кг) [35]. Согласно рисунку 2 кривую «сила-длина» можно аппроксимировать линией (черная пунктирная линия). Этот рисунок показывает, что допущение использования линейной пружины (например, в модели SLIP) между бедром и CoP является приемлемым. Следовательно, генерируемая сила ноги может быть аппроксимирована изменениями виртуальной длины ноги (расстояния от бедра до CoP). Таким образом, чтобы преобразовать дизайн экзокостюма на основе FMCH в пассивную версию, мы заменяем обратную связь по силе ног виртуальной длиной ноги, как показано на рисунке 1 (d) в экзокостюме на основе податливого бедра с модуляцией длины (LMCH).Измерить смещение можно легко, прикрепив лодыжку к бедру с помощью кабеля в качестве механического датчика для изменения эффективной жесткости двусуставной пружины. Это устраняет необходимость в электронных датчиках, которые были неизбежны для обратной связи по силе в системе помощи при ходьбе на основе FMCH.
Разработка двухсуставной пружины переменной жесткости с достаточно большим диапазоном жесткости, быстрым изменением жесткости и энергоэффективностью (не потребляющая энергии для удержания жесткости и возможность изменения жесткости даже при механической нагрузке) все еще является проблемой в конструкциях приводов с переменным импедансом [45 ].В приложении предлагается пассивный механизм для регулировки повышенной жесткости двухсуставной пружины с помощью обратной связи по длине. Предлагаемый механизм имеет три порта взаимодействия (этот термин заимствован из концепции управления импедансом [46]), в которых жесткость между двумя портами регулируется положением третьего входного порта. Из-за схожести функций этого механизма и транзисторов в электрических цепях мы называем его TransComp (от Transistor like Compliance).Дополнительную информацию см. В приложении. В целом, генерацию силы в (пассивном) экзокостюме на основе LMCH можно описать следующим уравнением:
Здесь L , L 0 , k и K обозначают виртуальную длину ноги, длину опоры пружины ноги, нормализованную и скорректированную жесткость усиленной пружины (AS) соответственно. Концепция помощи при ходьбе на основе LMCH может быть реализована путем подключения кабеля от стопы, проходящего через тазобедренный сустав, к третьему входному порту TransComp.Два других входных отверстия прикреплены к верхней части корпуса и хвостовику, как показано на рис. 1 (d)
2.3. Внедрение экзокостюма на основе LMCH в нейромышечной модели
Одним из подходов к оценке помощи при ходьбе с помощью экзокостюмов является исследование его влияния на потребление энергии человеком (метаболические затраты) и активацию мышц. Таким образом, анализируя эти два показателя, мы оцениваем помощь походке на основе LMCH в нейромышечной модели Гейера и Херра [28]. Для этого мы рассмотрели регулируемую податливость параллельно с HAM, которая применяет силу, рассчитанную по уравнению (6), с соотношением плеч рычага бедра и колена, равным 2.Затем была оптимизирована внешняя сила, чтобы свести к минимуму метаболические затраты при ходьбе. Далее мы сначала кратко представим нервно-мышечную модель [28], расширенную за счет добавления экзокостюма. Затем объясняется оптимизация для нахождения параметров экзокостюма.
2.3.1. Нервно-мышечная модель
Эта модель включает семь сегментов (1 верх тела, 2 бедра, 2 голени и 2 ступни) и семь мышц для каждой ноги; то есть подколенные сухожилия, Gastrocnemius, Vastus, Soleus, Gluteus Maximus, сгибатель бедра и передняя большеберцовая мышца.Используется модель мышц типа Хилла [42], и мышцы активируются на основе метода рефлекторного контроля (локальная обратная связь по длине / скорости / силе мышцы) [28, 47]. Было показано, что эта модель способна имитировать кинематику, кинетику, динамику и мышечную активацию человека при ходьбе в различных ситуациях [48].
Поскольку эта модель работает на основе управления рефлексами, ее можно рассматривать как адаптивную модель для прогнозирования реакций человека на внешние силы, такие как эффекты добавления вспомогательного устройства.В наших симуляциях мы не обновляем показатели рефлексов в нейромышечной модели после добавления экзокостюма. При фиксированной нервно-мышечной модели, если метаболические затраты при ходьбе уменьшаются, а модели движений существенно не меняются, ожидается, что оптимизация рефлексов приведет к более значительному снижению потребления энергии человеком. Следовательно, результаты этого исследования могут быть неоптимальным решением, которое можно даже улучшить, если владелец сможет правильно адаптироваться к экзокостюму.Для реализации экзокостюма в нейромышечной модели мы добавили привод между верхней частью тела и голенью. Подобно мышце HAM, этот привод может создавать моменты разгибания бедра и сгибания колена. Мы рассчитываем длину стойки ( L ) и длину привода ( l AS ), чтобы получить силу, определяемую уравнением (6). Затем эта сила была приложена к бедру и колену путем умножения на 0,1 (м) и 0,05 (м), чтобы получить соотношение плеч рычага 2.
2.3.2. Оптимизация
Чтобы найти максимальную помощь человеку при ходьбе (в модели нервно-мышечной симуляции) с точки зрения снижения метаболических затрат, мы оптимизировали контрольные параметры LMCH. Согласно уравнению (6) параметры управления настройкой, которые следует оптимизировать, следующие: L 0 , k и l AS 0 . Первое ограничение для оптимизации — устойчивость при ходьбе с желаемой скоростью. Здесь мы используем метод «шаг к падению» для определения стабильной походки.В качестве критерия устойчивости мы определяем 50 шагов без падения и запас в 5% для средней скорости в 50 шагов. Для минимизации энергопотребления в организме человека определена следующая функция стоимости (Дж):
где i обозначает шаг i th и — общие метаболические затраты во время шага ходьбы со смещением CoM d . Таким образом, Дж — это средняя потребляемая энергия (на метр) за последние M шагов.Здесь рассчитывается следующим образом:
В этом уравнении означает метаболические затраты каждой мышцы. Чтобы гарантировать достижение системой устойчивого состояния, мы вычисляем Дж, для последних 30 шагов ( M = 30) и сравниваем эту функцию стоимости с помощью и без посторонней помощи. Метаболические затраты каждой мышцы в уравнении (8) вычисляются по следующему уравнению:
где P met ( t ) — скорость метаболизма [49], вычисляемая по формуле:
в котором — функция x , которая аппроксимируется на основе эмпирических данных [50]:
Для нахождения оптимальных параметров LMCH мы используем глобальный перебор в разумном диапазоне, который минимизирует значение Дж , вычисленное по уравнению (7).Во-первых, мы нашли разумный диапазон параметров для L 0 и k , используя линейную функцию длины ноги для аппроксимации GRF (силы ноги). Для этого мы использовали экспериментальные данные человека из [35], как показано на рисунке 2. Используя результаты реализации FMCH в нашем предыдущем исследовании [26] и эти границы, мы нашли разумный диапазон для всех трех параметров. Для нахождения оптимального значения достаточно перебора с подходящим разрешением. Таким образом, вспомогательное устройство с оптимизированными параметрами сводит к минимуму метаболические затраты на транспортировку.
2.4. Эксперимент
Предлагаемая нами концепция состоит из двух основных характеристик: параллельности бедра и регулируемой жесткости. Чтобы проверить влияние первого свойства на помощь при ходьбе, мы разработали пассивный экзокостюм, использующий двухсуставные пружины с постоянной жесткостью, как показано на рисунке 3. Для второй функции мы разрабатываем регулируемое соответствие с механизмом TransComp, который находится в стадии разработки. (подробности см. в приложении). Экзокостюм состоит из двух силиконовых резиновых лент, напоминающих двухсуставные пружины, параллельных мышцам HAM и RF для каждой ноги, которые в дальнейшем называются двухсуставными искусственными мышцами (BAM).Для реализации податливых элементов мы предпочли резиновые ленты металлическим пружинам, потому что они мягкие и легкие, что предотвращает дискомфорт, возникающий при ударе качающихся пружин о бедро. Основная причина заключается в более высоком соотношении (накопленной) энергии / веса в резиновых лентах по сравнению с металлическими пружинами той же жесткости. Чтобы найти подходящий диапазон жесткости резиновых лент (усиленная пружина), мы провели эксперименты с двумя пилотными объектами перед заключительными экспериментами.Мы постепенно увеличивали жесткость и просили их ходить по беговой дорожке. Мы обнаружили минимальную жесткость, с которой испытуемые ощущали вклад экзокостюма, и максимальную жесткость, при которой они не чувствовали дискомфорта. Диапазон жесткости (показанный в таблице 1) для финального эксперимента выбирается на основе этих значений. В заключительном эксперименте испытуемые не участвовали.
Увеличить Уменьшить Сбросить размер изображения
Рисунок 3. Мягкий пассивный экзокостюм: (а) Различные части экзокостюма. Основные части включают в себя: две параллельные резиновые ленты, которые прикладывают крутящие моменты к коленям и бедрам, чтобы снизить потребление энергии, поясной бандаж, через который сила прилагается к верхней части тела, скоба голени, через которую сила прилагается к голени, и скобка голеностопного сустава, которая предотвращает движение бандажа хвостовика за счет силы резиновых лент. (b) вид сзади экспериментального испытания ходьбы по беговой дорожке с измерением метаболических затрат. (c) вид экзокостюма спереди.
Загрузить рисунок:
Стандартный образ Изображение высокого разрешенияТаблица 1. Технические характеристики экзокостюма . Определенный диапазон для некоторых параметров (вместо фиксированного числа) относится к разным размерам тела испытуемых.
| Компонент | Масса (г) | Описание | |
|---|---|---|---|
| Талия | 650 | ||
| Скоба | Хвостовик | 155 | Текстиль и поролон |
| Лодыжка | 100 | ||
| Низкая жесткость, 700 Н · м −1 | 50 | Ремешок из силиконовой резины с брезентовыми ремнями | |
| Усиленная пружина | Средняя жесткость, 1500 Н · м −1 | 53 | длина опоры: л AS 0 = 46– |
| Высокая жесткость, 2200 Н · м −1 | 55 | рычаги: r h = 18–– | |
| Наколенник | 160 | Пена и пластик | |
| Ремни | 25 | По 2 брезентовых ремня на каждую ногу | |
| Общая масса | 1780–1800 | Разница обусловлена выбранной пружиной. | |
На рисунке 3 показаны различные элементы и структура экзокостюма. Общая масса экзокостюма составляет 1,8 кг, и он состоит из четырех основных частей: резинки, поясной скобы, скобы голени и скобы голеностопа. Как видно на рис. 3 (а), мы прикрепили три скобы к телу, а резинки (показаны красным) соединены между поясными и голеностопными скобами с помощью ремешков, чтобы реализовать пассивные BAM. В этой конструкции рычаги на тазобедренном и коленном суставах имеют нулевое положение.2 м и 0,1 м соответственно. Ортез на голеностопный сустав фиксируется ниже живота икроножной мышцы и соединяется с опорой голени с помощью брезентовых ремней. Его функциональность заключается в том, чтобы избежать движения скобы хвостовика вверх при подъеме с помощью BAM. Более подробная информация о различных частях экзокостюма представлена в таблице 1.
В эксперименте приняли участие восемь здоровых мужчин (возраст 23–26 лет, масса 60–87 кг, рост 170–185 см). Все испытуемые были здоровы без каких-либо известных нервно-мышечных повреждений или функциональных нарушений.У них не было опыта ходьбы в экзокостюме. Они добровольно подписали форму информированного согласия, одобренную Научно-исследовательским институтом спорта Ирана.
В экспериментах измерялась скорость метаболизма, чтобы оценить, насколько расход энергии может быть уменьшен с помощью вспомогательного контроллера. Для этого при каждом экспериментальном испытании измеряли скорость потребления кислорода () и скорость выхода углекислого газа (). Все участники прошли по беговой дорожке со скоростью 1,3 мс −1 в разных условиях: 1) NE (без экзокостюма): нормальная ходьба без экзокостюма, 2) NS (без пружины): ходьба с полным экзокостюмом без подключения БАМ, и 3) Оказано: с вкладом пружин.Здесь мы провели эксперименты по ходьбе с тремя разными жесткостью (низкой, средней и высокой, описанной в таблице 1) для каждой из двухсуставных искусственных мышц. Чтобы найти оптимальную жесткость, различные комбинации этих трех жесткости были протестированы для каждой из двухсуставных искусственных мышц. Для высокой жесткости искусственной мышцы HAM мы пропустили среднюю и высокую жесткость искусственной мышцы RF (просто считающуюся низкой жесткостью), потому что эта комбинация ограничивает движения конечностей для испытуемых и вызывает дискомфорт.Поэтому мы протестировали 7 комбинаций на помощь (когда задействованы пружины). Для каждого субъекта мы выбрали результаты эксперимента с поддержкой с наименьшими метаболическими затратами, как результаты для случая Assisted . Эти 7 условий, помимо случаев NE и NS, составляли 9 различных условий для каждого испытуемого.
Измеренные данные взяты из пятиминутных экспериментов для каждого условия ходьбы. Эти девять условий были рандомизированы, чтобы избежать эффектов исходного уровня, усталости и обучения.Переключение между NE и двумя другими условиями (NS и Assisted ) требовало надевания или снятия экзокостюма с предшествующей двухминутной разминкой ходьбой. Кроме того, для измерения смещенных метаболических расходов с экзокостюмом и без него мы рассматривали трехминутное стояние для измерения смещенных метаболических затрат в экспериментах с экзокостюмом и без него отдельно. Более подробную информацию о протоколе эксперимента можно найти на рисунке 4.
Увеличить Уменьшить Сбросить размер изображения
Рисунок 4. Эксперименты включали постоянные испытания по измерению смещенного метаболического расхода, два испытания ходьбы без посторонней помощи и семь испытаний ходьбы с поддержкой с различной жесткостью пружины. Ходьба без посторонней помощи включает обычную ходьбу без экзокостюма (NE) и с экзокостюмом без пружин (NS). Порядок экспериментов рандомизирован, и при надевании или снятии экзокостюма учитывается двухминутная разминка. Каждое из экспериментов с экзокостюмом (NS или Assisted) включает 5-минутную ходьбу и 5-минутный отдых, обозначенные буквами «W» и «R» соответственно.Испытания на ходьбу и стояние занимают пять и три минуты соответственно.
Загрузить рисунок:
Стандартный образ Изображение высокого разрешения3.1. Моделирование
В этом разделе объясняются результаты моделирования применения двусуставного экзокостюма на основе LMCH для помощи человеку при ходьбе с умеренной скоростью (). Мы сравниваем мышечную силу, активацию мышц и метаболические затраты при «нормальной» ходьбе (без экзокостюма) с ходьбой Assisted (с экзокостюмом). Поскольку кинематика походки и скорость ходьбы существенно не меняются, что обусловлено ограничениями оптимизации, эти результаты не показаны.Оптимальные значения параметров настройки:, и. Что касается вариаций длины ноги ( L ) в имитационной модели, скорректированная жесткость будет изменяться между и. По сравнению с разработанным экзокостюмом эта переменная жесткость может быть приближена к фиксированной пружине с.
3.1.1. Активация мышц
Первые эффекты внешних сил должны наблюдаться при активации мышц. На рисунке 5 показаны изменения активности мышц в результате помощи при ходьбе. Поскольку предлагаемый экзокостюм разработан на основе концепции баланса верхней части тела, мышцы, участвующие в работе тазобедренного сустава, такие как HAM, GLU и HFL, будут иметь наиболее значительное сокращение.Изменения в других мышцах незначительны. Максимальное сокращение наблюдается в мышце HAM. Это ожидается, поскольку экзокостюм спроектирован параллельно мышце HAM. Чтобы лучше проанализировать отраженное воздействие на эту мышцу, ее активация показана на рисунке 6 в полном цикле походки. Значительное сокращение наблюдается в первые 40% цикла походки, в которых мышца HAM наиболее активна. Эти результаты подтверждают гипотезу конструкции экзокостюма на основе LMCH.
Увеличить Уменьшить Сбросить размер изображения
Рисунок 5. Средняя активация разных мышц за один шаг. Серый и зеленый цвета показывают мышечные силы в нормальных (без экзокостюма) и при поддержке (с экзокостюмом) условиях соответственно.
Загрузить рисунок:
Стандартный образ Изображение высокого разрешенияУвеличить Уменьшить Сбросить размер изображения
Рис. 6. Активация HAM во время полного шага. Серые и зеленые кривые показывают активацию мышц в нормальных (без экзокостюма) и при поддержке (с экзокостюмом) условиях соответственно.
Загрузить рисунок:
Стандартный образ Изображение высокого разрешения3.1.2. Мышечная сила
Мы знаем, что снижение мышечной активации не эквивалентно уменьшению силы. Однако, основываясь на ранее высказанном аргументе о концепции дизайна экзокостюма с контролем баланса, мы ожидаем аналогичного сокращения мышц тазобедренного сустава. На рисунке 7 показано значительное снижение мышечной силы HAM и GLU, небольшое снижение мышечной силы HFL и небольшое увеличение мышечной силы VAS и SOL.Кроме того, снижается общая генерируемая сила всех мышц, что может привести к снижению потребления энергии всем телом. Снижение мышечной силы HAM во время цикла походки показано на рисунке 8. При значительном снижении пиковой силы (около 40%) мы ожидаем меньшей необходимой пиковой мощности и меньшей утомляемости этой мышцы.
Увеличить Уменьшить Сбросить размер изображения
Рис. 7. Средняя сила различных мышц за один шаг.Серый и зеленый цвета показывают мышечные силы в нормальных (без экзокостюма) и при поддержке (с экзокостюмом) условиях соответственно.
Загрузить рисунок:
Стандартный образ Изображение высокого разрешенияУвеличить Уменьшить Сбросить размер изображения
Рис. 8. Сила HAM во время полного шага. Серые и зеленые кривые показывают мышечные силы в нормальных (без экзокостюма) и при поддержке (с экзокостюмом) условиях соответственно.
Загрузить рисунок:
Стандартный образ Изображение высокого разрешения3.1.3. Метаболические затраты
Подобно мышечной силе и активности, мы сначала показываем потребляемую энергию каждой мышцы на метр на рисунке 9. И снова сокращение мышц HAM, GLU и HFL достигается с помощью вспомогательного устройства, в то время как есть незначительное увеличение примерно на 3% в мышце VAS. Изменения метаболической стоимости других мышц игнорируются. Исходя из этих результатов, мы ожидаем снижения функции общих затрат ( Дж, ), определяемой уравнением (7).Это значение метаболических затрат для полных мышц ног снижается на 10%.
Увеличить Уменьшить Сбросить размер изображения
Рис. 9. Средняя потребляемая энергия ( Дж, ) разными мышцами при прохождении одного метра. Серый и зеленый цвета показывают J в нормальных (без экзокостюма) и вспомогательных (с экзокостюмом) условиях, соответственно.
Загрузить рисунок:
Стандартный образ Изображение высокого разрешенияНа рис. 10 показана скорость метаболизма при нормальном и вспомогательном состоянии во время цикла ходьбы.Более чем в 70% цикла походки скорость метаболизма снижается в режиме помощи. В первые 20% цикла походки наблюдается значительное снижение скорости метаболизма. Это интервал, когда подколенное сухожилие (которое параллельно экзокостюму) имеет максимальную активность, а двухсуставной экзокостюм для разгибателя бедра / сгибателя колена может значительно способствовать равновесию верхней части тела.
Увеличить Уменьшить Сбросить размер изображения
Рисунок 10. Общий уровень метаболизма при полном шаге. Серые и зеленые кривые показывают скорость метаболизма в нормальных (без экзокостюма) и при поддержке (с экзокостюмом) условиях соответственно.
Загрузить рисунок:
Стандартный образ Изображение высокого разрешения3.1.4. VPP как показатель для контроля осанки
Основная концепция нашего дизайна экзокостюма на основе LMCH основана на модели виртуальной точки поворота (VPP). Таким образом, помощь этого экзокостюма должна также улучшить контроль над балансом, обеспечивая более целенаправленный VPP.На рисунке 11 изображены векторы GRF в системе координат с центром в CoM и выровненными с ориентацией верхней части тела, в то время как VPP показан красным кружком. Нервно-мышечная модель для нормальной ходьбы без посторонней помощи предсказывает VPP примерно выше CoM, что соответствует результатам, полученным при ходьбе человека с нормальной скоростью. В случае с вспомогательной помощью векторы GRF более сфокусированы, создавая более четкую VPP. Кроме того, уменьшается расстояние между VPP и CoM.
Увеличить Уменьшить Сбросить размер изображения
Рисунок 11. Улучшение контроля баланса на основе концепции VPP с нервно-мышечной моделью. Красный цвет показывает VPP, зеленый цвет показывает COM в центре координат, а черные пунктирные линии показывают векторы GRF, взятые из CoP. (Слева) нормальная ходьба, (справа) вспомогательная ходьба.
Загрузить рисунок:
Стандартный образ Изображение высокого разрешения3.2. Результаты экспериментов
В этом разделе мы представляем результаты помощи при ходьбе с пассивным экзокостюмом, описанные в разделе 2.4. Чтобы исследовать эффекты добавления двухсуставных пружин, во-первых, мы сравниваем метаболические затраты на вспомогательный тест с тестом без пружины (NS). Эти результаты будут сравниваться с нормальной ходьбой (без посторонней помощи), которая называется ходьбой без экзокостюма (NE). Стоит напомнить, что для каждого испытуемого мы выбрали данные вспомогательного эксперимента (когда пружины вносят свой вклад) с самым низким уровнем метаболизма, а данные вспомогательного — это среднее значение этих испытаний для разных испытуемых. Таким образом, мы нашли оптимальное расположение жесткости для каждого предмета (которое может быть разным для разных предметов) и выбрали его, чтобы помочь этому конкретному предмету.На рисунке 12 представлены экспериментальные результаты средней скорости метаболизма за последние две минуты ходьбы за вычетом метаболических затрат стоя. Просто надев экзокостюм без пружин, скорость метаболизма увеличивается на 12,9 6,5%. Это может быть связано с несовершенным интерфейсом пользователя и устройства и добавлением неидеальных носимых деталей (например, подтяжек) на ноги и поясницу. Asbeck и др. показали, что дополнительная масса ног уже может увеличить метаболические затраты на 8% / кг [51].Интересно, что сравнение Assisted и NS показывает, что оптимальная жесткость пассивных двусуставных искусственных мышц бедра приводит к снижению метаболических затрат на 14,7 4,27%. Эти результаты подтверждают статистически значимый эффект упругого элемента (BAM), подтвержденный парным t-критерием с P = 0,0035. Таким образом, средний уровень метаболизма при нормальной ходьбе снижается на 4,68 4,24% при использовании предложенного пассивного экзокостюма с настроенной жесткостью.
Увеличить Уменьшить Сбросить размер изображения
Рисунок 12. Средняя и стандартная ошибка средней скорости метаболизма, полученной у 8 здоровых субъектов в течение последних двух минут ходьбы при самостоятельной ходьбе ( NE , No Exo) при ходьбе с экзокостюмом без использования пружин ( NS , без пружины) и Помощь при ходьбе (с оптимальной жесткостью для каждого предмета). Значок * показывает значительную разницу между случаями NS и Assisted (парный t-критерий с P = 0,0035).
Загрузить рисунок:
Стандартный образ Изображение высокого разрешенияВ этой статье представлен новый биологический подход к разработке вспомогательных устройств. Предлагаемый экзокостюм отличается легкостью, небольшими размерами и недорогой конструкцией. Из-за мускулистой (гибкой и основанной на растяжении) конструкции пассивных / активных двусуставных структур их срабатывание в мягких носимых вспомогательных устройствах растет [14, 52]. В этом отношении мы воспользовались свойствами двухсуставных мышц бедра, такими как синхронизация соседних суставов без необходимости сенсорной обратной связи [53], пассивная передача энергии между соседними суставами [54] и обеспечение доступа к управлению направлением GRF с незначительным воздействием на суставы. Величина GRF [44].Последний фактор очень важен для контроля баланса [44].
4.1. Преимущества помощи при ходьбе на основе LMCH в исследованиях моделирования
Для анализа функциональности и определения оптимальных механических и управляющих параметров экзокостюмов используются нейромышечные имитационные модели [55]. В [26] Sharbafi и др. расширили нейромышечную модель ходьбы из [28], чтобы оценить концепцию помощи при ходьбе с помощью экзокостюма, который имеет HAM-подобные приводы с использованием управления на основе FMCH.Результаты показали снижение мышечной активности GLU и HAM и 12% метаболических затрат [26]. В этой статье мы сделали еще один шаг, заменив обратную связь по силе на обратную связь по длине, которую можно использовать в пассивных вспомогательных устройствах. Результаты моделирования сопоставимы с результатами моделирования контролируемого экзокостюма на основе FMCH [26] в отношении мышечной активности, силы и метаболических затрат. Этот результат не только поддерживает аппроксимацию силы ног линейной функцией длины виртуальной ноги [35], предсказанной моделью SLIP [30], но также подтверждает применимость такого приближения для упрощения конструкции вспомогательных устройств и управления ими.Результаты также показывают, что снижение мышечной активности, связанной с балансом, существенно не увеличивает вклад других мышц (ниже 3%), что не вызывает побочных эффектов, таких как мышечная боль. Выраженное сокращение мышц тазобедренного сустава преобладает над таким незначительным увеличением. Это подтвердило нашу цель — помочь контролировать баланс путем параллельного подключения пружины переменной жесткости к HAM-мышце. Мы ожидаем, что этот экзокостюм может компенсировать мышечную слабость (обычно наблюдаемую при травмах в таких видах спорта, как футбол или баскетбол), обеспечивая часть необходимой силы во время сгибания бедра и разгибания колен.
Поскольку метод LMCH (как приближение к FMCH) исходит из виртуальной точки поворота (VPP), предполагалась концепция управления балансом, основанная на биоинспирации, улучшенная балансировка. Сравнение местоположения VPP до и после добавления экзокостюма показало уменьшение расстояния между VPP и CoM. Это означает, что верхняя часть тела имеет меньше колебаний с более плавным контролем позы. Более того, более сфокусированный VPP может быть явно обнаружен с помощью, которая поддерживает периодические движения верхней части тела.
Исследование походки человека показало, что на длину мышцы HAM не оказывает существенного влияния укорочение или удлинение ноги [56, 57], хотя она сильно зависит от угла между верхней частью тела и ногой. Это означает, что двусуставные мышцы бедра могут играть роль датчиков для непосредственного измерения ориентации оси конечности. Таким образом, использование БАМов в экзокостюме обеспечивает простое решение постуральной проприоцепции для поддержки контроля баланса. В рамках подхода LMCH мы связываем длину ноги с углом верхней части тела, что означает использование опорной подфункции стойки для управления подфункцией опорно-двигательного аппарата баланса .Синхронизация между различными локомоторными подфункциями недавно была введена в рамках концепции «согласованный контроль» [58]. При согласованном управлении минимальный сенсорный обмен используется для синхронизации различных локомоторных подфункций, при этом нет необходимости иметь центральный или контролирующий контроль для управления координацией. Интерпретация LMCH в этом контексте может быть представлена как независимый контроль осевых и перпендикулярных сил ног с помощью моно- и двусуставных мышц, что согласуется с исследованиями на людях [59] и роботах [44].Модульность в рамках согласованного управления посредством назначения различных локомоторных подфункций различным двух- и моносуставным мышцам может быть достигнута с помощью определенных параметров конструкции, таких как соотношение плеч рычагов в двусуставных мышцах. У людей отношение момента руки к моменту от бедра к колену в двухсуставных мышцах бедра больше единицы [60] (2 для HAM и 1,3 для RF-мышцы [61]). Соотношение для нашего HAM-подобного BAM также установлено на 2 в дизайне нашего экзокостюма. Таким образом, используя биартикулярность, мы получаем выгоду от модульности, а с помощью обратной связи по длине ног мы пытаемся интегрировать управление экзокостюмом в (согласованный) моторный контроль человека.В будущем концепция согласованного контроля может быть исследована с других точек зрения, например, с точки зрения мышечной синергии [62].
4.2. Преимущества двусуставной податливости, основанные на результатах экспериментов
Для оценки результатов моделирования была построена упрощенная версия экзокостюма и испытана в экспериментах по ходьбе на беговой дорожке. В разработанном устройстве мы сосредоточились на эффектах постоянных BAM (двухсуставных искусственных мышц), в то время как механизм реализации обратной связи по длине не был доработан для использования в экзокостюме.Вместо этого RF-мышце также помогли с помощью второго BAM в экзокостюме, который не исследовался в симуляциях (потому что нервно-мышечная модель [28] не включает его). Как описано в разделе 2, мы выбрали диапазон параметров (длина покоя и жесткость) усиленных пружин разработанного экзокостюма на основе отзывов человека, независимо от оптимальных значений исследования моделирования. Интересно, что предсказания имитационной модели (,) соответствуют экспериментальным данным (( K = 700–, l AS 0 = 0.46–). Это показывает, что результаты нервно-мышечного моделирования могут быть использованы для оценки рабочего диапазона механических параметров.
Результаты подтверждают, что с помощью двухсуставных пассивных пружин метаболические затраты при ходьбе могут быть снижены. Стоит отметить, что значительное увеличение метаболических затрат при нормальной ходьбе (NE, без экзокостюма) только за счет ношения экзокостюма, когда пружины не действуют (NS, без пружины), демонстрирует неэффективную конструкцию носимых частей. е.грамм. с дополнительной массой и неудобным механизмом крепления к телу. Для уменьшения таких проблем в будущем требуется улучшенная конструкция. Несмотря на увеличение метаболических затрат примерно на 13%, использование искусственных двусуставных мышц бедра (эластичных лент) может привести к снижению потребления энергии даже по сравнению с обычной ходьбой. Другими словами, эти пассивные элементы не только компенсируют эффект несовершенного дизайна, но также обеспечивают дополнительные преимущества (улучшение почти на 5%) с точки зрения эффективности ходьбы.Тем не менее, мы не смогли найти конкретных комбинаций жесткости RF и HAM, которые могли бы снизить метаболические затраты по сравнению с ходьбой без посторонней помощи (случай NE). Поэтому необходимы дальнейшие улучшения в механической конструкции нашего экзокостюма, чтобы сделать достижения более сопоставимыми с современными пассивными экзоскелетами, например. [21] с 7% и [19] с 8% сокращением.
Вспомогательные устройства обычно направлены на повышение экономии энергии при движении за счет поддержки крутящего момента сустава или механической работы.Недавно Beck и др. [63] показали, что потребление энергии при ходьбе улучшается, если уменьшаются активные мышечные силы. Следовательно, вспомогательные устройства при ходьбе должны быть нацелены на поддерживающую мышечную силу, а не на момент суставов или механическую работу. В нашем пассивном экзокостюме обеспечение части сил, которые, как предполагается, вырабатываются человеческими мышцами RF и HAM, может привести к уменьшению объема активных мышц, что, по-видимому, является основным фактором улучшения экономики передвижения [63].Эта новая точка зрения на прогнозирование функции метаболических затрат человека на основе активного объема мышц [63] также может описывать снижение метаболических затрат с помощью других пассивных устройств [21, 19], что может быть подтверждено измерением функциональных возможностей мышц, например. по УЗИ.
Применяя импульсные возмущения высоты тона к верхней части тела во время стояния, Шумахер и др. продемонстрировали, что двусуставные мышцы бедра вносят основной вклад в контроль равновесия, поскольку имеют наибольшее увеличение активации [64].Дальнейшее исследование функционирования мышц при локомоции показывает увеличение длины RF в поздней стойке, что поддерживает начало раскачивания ног вместе с концентрическим сокращением [65]. Мышца HAM реципрокно создает силу, растягиваясь во второй половине фазы замаха, что приводит к втягиванию ноги непосредственно перед приземлением [66], за которым следует поддерживающее разгибание бедра в ранней фазе опоры [65]. Благодаря тому же принципу работы, что и человеческие двусуставные мышцы бедра [67], наш пассивный экзокостюм может помочь при ходьбе, обмениваясь энергией между коленными и тазобедренными суставами, а также между фазами стойки и маха.
4.3. Перспективы на будущее
В представленных здесь экспериментах мы протестировали только три значения жесткости для каждой из двухсуставных пружин. Недавно была введена оптимизация «Человек в контуре» (HILO) как практический инструмент для оптимизации параметров управления вспомогательными устройствами [13]. Этот метод можно использовать в будущем, чтобы найти оптимальную жесткость с помощью представленного здесь экзокостюма. Следующим шагом этого исследования является расширение разработанного экзокостюма на основе концепции LMCH. Мы ожидаем, что пассивная настройка податливости двусуставной мышцы бедра с учетом длины ноги может еще больше увеличить снижение метаболизма.Адаптация к жесткости в мышцах человека наблюдалась уже при ходьбе [68, 69]. Кроме того, в наших симуляциях второй BAM для поддержки RF не был реализован (из-за ограничений модели), тогда как эксперименты и наш недавний анализ в OpenSim подтверждают преимущества добавления такого элемента. В работе [70] двухсуставные пружины с постоянной жесткостью использовались для имитации качательных движений ног при ходьбе человека. В недавно разработанном экзокостюме мы объединили основанную на FMCH регулировку жесткости BAM в фазе стойки с подходом постоянной жесткости [70] и протестировали это с экспериментальной моделью в OpenSim [24].Этот метод также был оценен путем внедрения на недавно разработанном экзокостюме (названном BAExo, показанном на рисунке 13), и предварительные результаты подтверждают основную концепцию контроля с использованием двухсуставного регулируемого соответствия. Эту настройку также можно использовать для проверки управления на основе LMCH в качестве доказательства концепции.
Увеличить Уменьшить Сбросить размер изображения
Рис. 13. BAExo (экзокостюм с двухсуставными приводами бедра), использующий SEA для двухсуставных приводов бедра, имитирующие мышцы HAM и RF в человеческом теле.
Загрузить рисунок:
Стандартный образ Изображение высокого разрешенияИспользование биологических исследований в области разработки вспомогательных устройств и управления ими в последние годы растет, например: с биоинспирированным морфологическим дизайном [14, 22, 71], нервно-мышечными моделями [72] и применением HILO [73]. Наше исследование также представляет новый биоинспирированный подход к разработке пассивного вспомогательного устройства. С предлагаемой абстракцией сложного нейромеханического взаимодействия между различными участниками движения в человеческом теле (например,грамм. двигательные нейроны, мышцы) предлагается упрощенное решение для применения в помощи при ходьбе. При таком подходе мы можем извлечь пользу из унаследованной концепции биологического дизайна и контроля на практике, чтобы разработать дешевое устройство для большого числа пользователей, а не только для людей с ограниченными возможностями.
Исследование, представленное здесь, демонстрирует потребность в будущих исследованиях для решения технологических проблем в широком диапазоне приложений, чтобы извлечь выгоду из (теоретических) потенциалов двууставного срабатывания.Исследования, которые применяют двухсуставные механизмы на вспомогательных устройствах для поддержки различных подфункций опорно-двигательного аппарата, а также для синхронизации подфункций, должны быть рассмотрены в будущем и должны оценивать особенности, отличные от экономики передвижения, такие как устойчивость при ходьбе.
Это исследование было частично поддержано INSF в рамках гранта № 95849456, частично Немецким исследовательским фондом (DFG) в рамках гранта № Ah407 / 2-1 и частично Иранским национальным научным фондом (INSF) в рамках гранта №95849456. Мы благодарны Грегу Савицкому и Андре Зейфарту за конструктивные обсуждения описания экспериментальных результатов. Мы также хотели бы поблагодарить Дженнифер Наттер за ее огромную поддержку при редактировании статьи.
Идут споры об идеальных приводах, но идеальный привод с пружиной переменной жесткости должен иметь компактную конструкцию, большой диапазон жесткости и быстрое изменение жесткости, не требовать энергии для сохранения жесткости и иметь возможность изменять жесткость при механической нагрузке [45].Для приводов с переменным импедансом представлены различные конструкции (VIA, например, Maccepa [74]), но до сих пор нет выигрышного решения [75]. Кроме того, создание регулируемого исполнительного механизма, который ведет себя как двухсуставная мышца, является более сложной задачей. Две проблемы — это создание растягивающего усилия и влияние на два сустава. Например, во многих VIA (таких как Maccepa) жесткость регулируется путем изменения плеча рычага взаимосвязанной пружины (см. Больше примеров в [75]). Этот метод не применим для двухсуставных мышечных приводов, поскольку рычаги уровня с обеих сторон привода должны изменяться одновременно, без изменения соотношения между ними.Кроме того, для пассивной реализации LMCH мы хотим соединить длину ноги (например, кабелем) с VIA для регулировки жесткости без использования двигателей внутри привода. Для этого, хотя могут использоваться различные механизмы [76], здесь мы представляем TransComp как концептуальный проект для реализации модуляции соответствия на основе длины.
Предлагаемый механизм имеет три порта взаимодействия (ввода), которые протягиваются кабелями, как показано на рисунке A1. TransComp состоит из рамы, которая соединена 4 кабелями с внутренним механизмом.Внутренний механизм имеет две пружины, которые соединены параллельно двумя стержнями. Штанги могут перемещаться внутри двух ползунков, которые соединены с портом 1 и портом 2. Эти два порта должны быть прикреплены к верхней части тела и голени для поддержки двухсуставных мышц бедра. Кабель, проходящий через порт 3, будет действовать как система измерения длины ноги. При вытягивании этого кабеля (справа на рисунке A1) измеряемая жесткость между портом 1 и портом 2 приближается к K 2 .Из-за соединения внутреннего механизма с рамой пружиной K 3 , освобождение троса порта 3 (что происходит, когда колено согнуто) приводит к перемещению внутреннего механизма в противоположном направлении (влево на рисунке A1. ). Таким образом, результирующая жесткость между портом 1 и портом 2 становится ближе к K 1 . При установке укорочение и удлинение ног приведет к усилению жесткости и смягчению податливости двухсуставного сустава, как это предлагается в методике помощи при ходьбе на основе LMCH.Простой эксперимент с разработанным устройством показан на рисунке А1 (справа). Мы повесили груз весом 1 кг (10 Н) на порт 2, когда порт 1 был подключен к фиксированной точке на столе. При вытягивании и отпускании кабеля, подключенного к порту 3, жесткость между портом 1 и портом 2 изменяется, что приводит к смещению веса. Поскольку направление силы в Порте 3 (почти) перпендикулярно приложенной силе из-за переменной жесткости (ощущается между Портом 1 и Портом 2), энергия, необходимая для сохранения жесткости или переключения с одной жесткости на другую, будет минимизирована.Для этого нам нужно установить высокие и низкие значения, соответственно, для статического и кинетического трения между ползунком и стержнем. Примечательно, что предложенный механизм может также поддерживать загрузку и разгрузку опорной ноги. Когда опорная нога загружена (первая половина фазы опоры) и (виртуальная) нога укорачивается, потенциальная энергия, создаваемая силой тяжести, может сохраняться в TransComp за счет увеличения жесткости. Во время разгрузки ноги (вторая половина фазы стойки), что приводит к удлинению ноги, уменьшение жесткости в TransComp может поддерживать движение тела вверх.Однако точная настройка этой системы для получения предписанной формулы (уравнение (6)) имеет решающее значение. Это доказательство концепции, демонстрирующее функциональность механизма. Действительно, чтобы предоставить подходящий инструмент для использования в экзокостюме, требуются дальнейшие попытки.
Увеличить Уменьшить Сбросить размер изображения
Рисунок A1. Концепция модуляции двусуставной податливости на основе длины с механизмом TransComp.(Слева) Концептуальная схема ТрансКомп. Изменения длины стойки передаются тросом, который может перемещать внутренний механизм (состоящий из двух параллельных пружин ( K 1 и K 2 ), соединенных двумя стержнями), горизонтально через порт 3. Таким образом реализованная жесткость между портом 1 и 2 изменяется. Пружина K 2 возвращает механизм влево, когда кабель в порту 3 высвобождается. (Справа) Простая разработанная структура и эксперимент в качестве доказательства концепции, демонстрирующей функциональность механизма TransComp.TransComp подвешен к столу верхним кабелем (порт 1), а груз весом 1 кг (10 Н) подключен к порту 2 в качестве нагрузки на регулируемые пружины. Максимальное вытягивание кабеля порта 3 привело к тому, что измеренная жесткость была почти равной K 2 (верхний рисунок). Это происходит при конфигурации вытянутой ноги. При сгибании колена трос порта 3 высвобождается (нижний рисунок), пружина K 3 возвращает внутренний механизм, и измеренная жесткость становится близкой к K 2 , что жестче, чем K 1 .
Загрузить рисунок:
Стандартный образ Изображение высокого разрешенияКак уменьшить болезнь VR? Просто добавьте виртуальный нос
В 1950-х годах военно-морской флот представил симулятор, который учил пилотов управлять вертолетом, не выходя из виртуальной кабины. Они могли взлетать, перемещаться по ухабистому воздуху и приземляться, даже не покидая земли. Это был прорыв, который позволил все большему числу пилотов тренироваться без риска разбиться. Но симулятор был не так уж и удобен, и значительное количество пилотов чувствовали себя чертовски больными при его использовании.
Само по себе это не укачивание, хотя симптомы были сопоставимы: головокружение, тошнота, потливость, дезориентация. Тогдашние исследователи окрестили это физиологическое явление «симуляционной болезнью», одним из первых предшественников симптомов гриппа, которые некоторые ощущают после того, как сегодня надели наушники виртуальной реальности.
Устранение симуляционной болезни — главный интерес растущей индустрии виртуальной реальности, но пока нет однозначного ответа. Домашние средства включают употребление алкоголя, в то время как такие компании, как Oculus Rift, изучают лучшее позиционное отслеживание и улучшенное разрешение экрана.Но исследователи из Университета Пердью считают, что они нашли способ уменьшить негативные физические эффекты виртуальной реальности, используя то, что находится прямо перед вашим лицом.
«Мы обнаружили, что использование виртуального носа в сцене, кажется, имеет стабилизирующий эффект», — говорит Дэвид Уиттингхилл, доцент кафедры компьютерных графических технологий Университета Пердью. Правильно, говорит Уиттингхилл, размещение шноза в центре нижней части экрана гарнитуры снижает на 13 последствия болезни симулятора.5 процентов.
Симуляторная болезнь все еще изучается, но исследователи часто указывают на сенсорный конфликт в качестве основной причины. Эта теория утверждает, что диссонанс между тем, что ваши глаза видят на экране, и типом движения, которое ощущает ваше тело, может привести к дезориентации и ощущению тошноты. Допустим, вы катаетесь на виртуальных американских горках. Когда вы поднимаетесь на первый большой холм каботажного судна, ваши глаза будут регистрировать наклон вверх, но ваша вестибулярная система — трубки жидкости в наших ушах, которые помогают нам определять наше положение в мире — остается неизменной.«Нашему телу это не нравится, — говорит Уиттингхилл.
Уиттингхилл и его команда студентов (Брэдли Зиглер, Джеймс Мур и Тристан Кейс) говорят, что неофициальные данные показывают фиксированную точку отсчета в кадре, например приборные панели и кабины автомобилей, как правило, уменьшают ощущение болезни симулятора. Это заставило их задуматься о носе как о естественном ориентире и о том, что он явно отсутствует в гарнитурах виртуальной реальности, похожих на очки.
В небольшом исследовании 41 участник использовал различные приложения VR (одна симуляция прогулки по тосканской вилле, другая — катания на американских горках).Половина играла в игры виртуальным носом, другая половина — без него. Уиттингхилл обнаружил, что участники с носом могли играть в игру на тосканской вилле на 94,2 секунды дольше, чем те, кто играл без нее, в то время как время игры на американских горках увеличилось на 2,2 секунды.
«Этого недостаточно, — говорит Уиттингхилл. Но это многообещающее начало, особенно потому, что участники, играющие с виртуальным носом, даже не заметили его. «Это большой гудящий нос», — говорит он.«Нам никогда не приходило в голову, что они не заметят этого, но они почти всегда были сбиты с толку тем, о чем мы вообще говорили». Уиттингхилл говорит, что это, вероятно, результат «слепоты к изменениям», феномена восприятия, который позволяет нашей системе восприятия игнорировать объекты, которые мы видим снова и снова.
