
Мышцы агонисты, антагонисты и синергисты – анатомия и примеры
Сложное строение мышечной системы человека обладает рядом функций, в частности, двигательной. Мышцы, покрывающие скелет, выполняют различные движения в процессе жизнедеятельности, в том числе физические упражнения. В процессе нагрузки одна мышца не может работать в одиночку, она является только частью взаимодействия нескольких мышечных групп. Знание понятий: агонист, антагонист и синергист, позволят разобраться в системе мышечной связи при выполняемых нагрузках и правильно составлять программы тренировок.
Содержание
Что это такое мышцы агонисты, антагонисты и синергисты
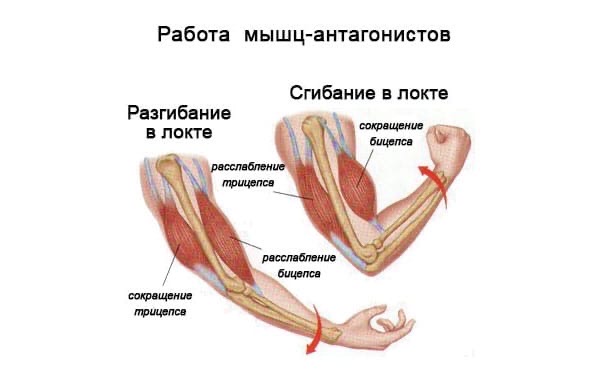
Агонисты – скелетные мышцы, которые выполняют основное движение в определенном упражнении. То есть агонистом может быть любая мышца, для ее определения необходимо конкретное движение. Например, сгибание рук в локтевом суставе, в этом случае агонистом выступает двуглавая мышца плеча.
Антагонисты – это мышцы, выполняющие противодействие агонистам. Если агонистом при сгибании руки выступает бицепс, то при разгибании антагонистом будет выступать трицепс. Но так же может быть в точности наоборот. В движениях при разгибании агонистом будет трицепс, а бицепс – его антагонистом. Мышцы меняются ролями только относительно движения.
Если агонистом при сгибании руки выступает бицепс, то при разгибании антагонистом будет выступать трицепс. Но так же может быть в точности наоборот. В движениях при разгибании агонистом будет трицепс, а бицепс – его антагонистом. Мышцы меняются ролями только относительно движения.
Синергисты – эти мышцы выступают помощниками агонистов при движении, забирая часть нагрузки на себя, либо являются стабилизаторами (фиксаторами) положения. Ни одна мышца не может сокращаться изолированно, в помощь всегда включаются дополнительные, как наружные мышцы, так и внутренние – глубокие мышцы.
Примеры мышц антагонистов
Перечень основных внешних групп антагонистов, которые работают в силовых упражнениях:
- Двуглавая мышца плеча – трехглавая мышца плеча.
- Локтевая – плечевая.
- Четырехглавая мышца бедра – двуглавая мышца бедра.
- Грудные мышцы – мышцы спины.
- Мышцы, отводящие бедра – приводящие мышцы.
- Мышцы сгибатели туловища – мышцы разгибатели спины.

Также и головки одной мышцы могут выступать антагонистами, например, передний и задний пучок дельтовидной мышцы. Передний пучок задействуется при выталкивании корпуса в отжиманиях, жимах, и приводит руки перед собой, то задний пучок, наоборот, отводит, задействуется при тягах, то есть выполняет противоположное движение.
Примеры мышц синергистов
В каждом упражнении у целевой мышцы есть свой помощник или фиксатор. Примеры:
- В изолирующем односуставном упражнении на сгибание рук, синергистом бицепса выступает плечевая мышца, которая сгибает предплечье.
- При разгибании рук синергистом трицепса является локтевая мышца, разгибающая предплечье.
- В жиме лежа целевыми являются грудные мышцы, в то время как их синергистами выступают трицепсы. В этом случае мышцы задней поверхности плеча забирают часть нагрузки с грудных, разгибают руки в плечевом и локтевом суставе.
- Синергистами мышц спины выступают бицепсы, например, при тяговых движениях забирают часть нагрузки и сгибают руки.

- В случае такого многосуставного упражнения, как приседания, для мышц разгибателей бедра – квадрицепса, синергистом являются ягодичные мышцы, которые участвуют в разгибании туловища (в динамике). Но так же их синергистами будут мышцы живота и поясничные разгибатели, которые выполняют стабилизирующую функцию, находясь в статике, и удерживают позвоночник в правильном положении.
Как лучше тренировать мышцы синергисты и антагонисты
Существует несколько вариантов выполнения программ, построенных по принципам взаимодействия мышц, с учетом физической подготовки.
1. Тренировка на целевые группы (агонисты)
Новичкам для того, чтобы не перегружать мышцы более чем одним упражнением, в один день подбираются определенные агонисты.
- Например, квадрицепсы, спина, трицепсы, передняя и средняя дельта, прямая мышца живота.
- Тогда на следующем занятии тренируются их антагонисты: бицепсы бедра, грудные, бицепсы плеча, разгибатели позвоночника, задние дельты.
Таким образом, получается два тренировочных комплекса. Первый день можно выполнять третий раз за неделю, а 2 день переносить на следующую неделю.
По мере привыкания к нагрузкам необходимо усложнять мышцам задачу, и выполнять более одного упражнения на определенные группы.
2. Сплит тренировки мышц синергистов
Сначала выполняются упражнения на крупные группы, потом идет работа уже утомленных мелких мышц синергистов. Три тренировочных дня достаточно, чтобы проработать все мышцы за неделю.
- День 1. Ноги с плечами (4-6 упражнений на квадрицепсы и бицепсы бедра, 2-3 на дельты).
- День 2. Грудь (3 упражнения) – трицепс (2 упражнения).
- День 3. Спина (3 упражнения) – бицепс (2 упражнения).
3. Тренировка антагонистов
Метод подходит для более подготовленных спортсменов, когда за одну тренировку прорабатывается определенная группа и ее противник. Каждая группа мышц выполняет одинаковое количество упражнений с антагонистом. Такой способ уже сложнее, так как антагонистом крупной мышцы является также крупная группа, к примеру, грудь – спина.
Такой способ уже сложнее, так как антагонистом крупной мышцы является также крупная группа, к примеру, грудь – спина.
Пока агонист расходует энергию, антагонисту остается меньше сил, хотя для его работы необходимо не меньше усилий. Новичкам выполнять такие нагрузки сложнее, на первой группе мышц запасы энергии истощаются в достаточном количестве, а для качественной проработки второй группы просто не хватает сил. В связи с этим к нагрузке по этому принципу стоит приступать подготовленными атлетам.
- День 1. Мышцы ног (квадрицепсы, бицепсы бедра).
- День 2. Плечи (все пучки, по два упражнения на каждый).
- День 3. Спина – грудь (по 3 упражнения на каждую группу).
- День 4. Бицепс – трицепс (по 3 упражнения на каждую мышцу).
Каждая схема тренировок переносится всеми по-разному, поэтому ее следует подбирать индивидуально, прислушиваясь к отклику собственных мышц.
Заключение
Знание строения и взаимодействия собственных мышц позволит правильно распределить на них нагрузку. Это поможет развивать симметричную и красивую форму. В силовых тренировках важно добиваться пропорций, а не утомлять одну-две, на вид отстающие или привлекающие внимание, мышцы.
Это поможет развивать симметричную и красивую форму. В силовых тренировках важно добиваться пропорций, а не утомлять одну-две, на вид отстающие или привлекающие внимание, мышцы.
Видео о мышцах антагонистах
А также читайте, что такое крепатура и как от нее избавиться →
Мышцы антагонисты и мышцы синергисты
В современном бодибилдинге большинство тренировочных программ построено с учётом условного разделения мышц на антагонисты и синергисты.
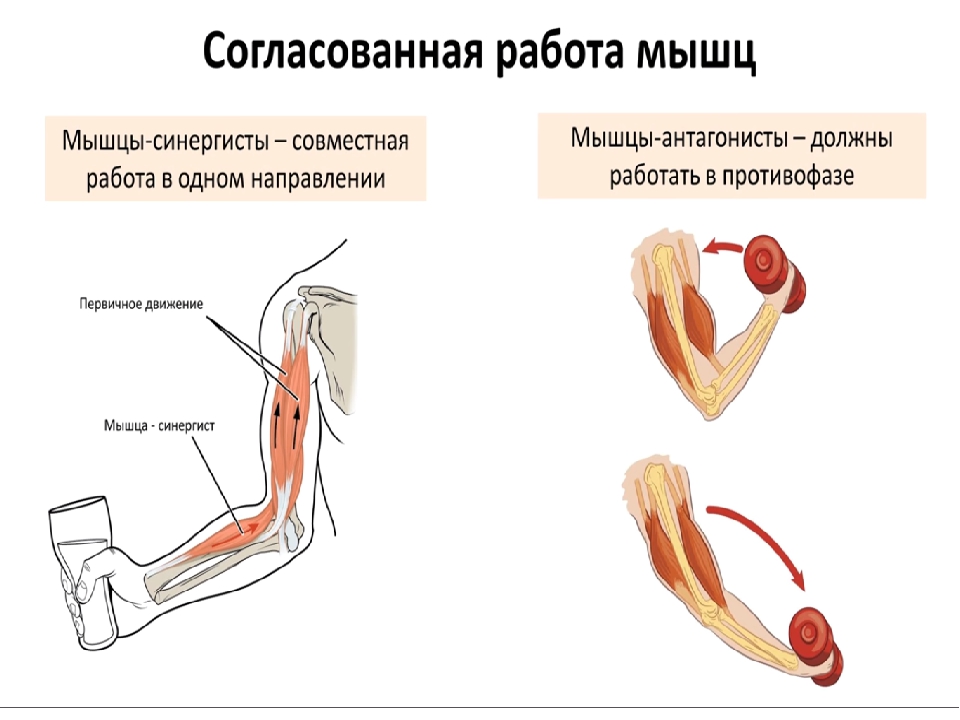
Антагонисты — это группы мышц, создающие противоположное действие по отношению друг к другу, то есть, иными словами, это мышцы-сгибатели и разгибатели суставов.
Во время выполнения упражнения на определённую мышцу противоположный антагонист находится в стадии отдыха либо лёгкого статического напряжения. Таким образом, тренировки можно построить по принципу парной проработки мышц, учитывая их размер и восстановительную способность.
Основные парные группы мышц антагонистов:
Бицепс – трицепс
Квадрицепс – бицепс бедра
Грудные мышцы – широчайшие мышцы спины
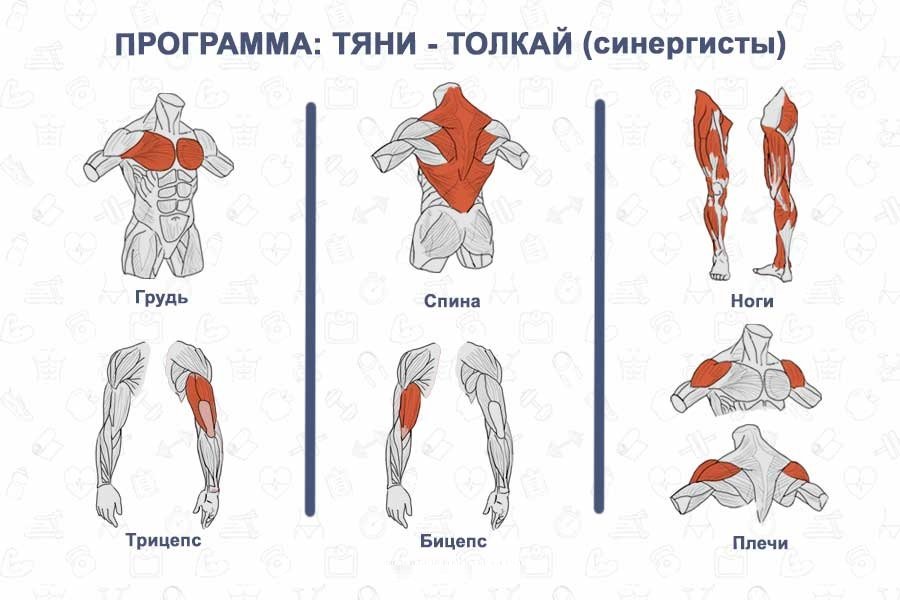
Синергисты представляют собой группы мышц, которые работают однонаправлено, т.е. выполняют одинаковую сократительную функцию в различных упражнениях.
Основные парные группы мышц синергистов:
Трицепсы – грудные мышцы
Широчайшие мышцы спины – бицепсы
Мышцы ног – ягодицы
Плечи (пучки дельтовидных) принято считать синергистами, поскольку их развитие имеет несколько направлений – преимущественно в жимах, а также во всевозможных тягах и разведениях под разными углами.
ЧТО ЭФФЕКТИВНЕЕ ТРЕНИРОВАТЬ
До сих пор существует масса мнений и разногласий по поводу того, какие же мышцы тренировать и как составлять расписание. Несмотря на обилие различных вариантов сплит-программ, невозможно определить точно, какая именно тренировка окажется эффективной для конкретного человека.
Не станем рассматривать, какой тип работы будет выполняться на занятии. Оба спортсмена будут работать весь месяц по одной схеме тренировок (антагонистов), затрачивая одинаковое количество времени на работу, а также на отдых между подходами и упражнениями. Справедливо будет добавить ко всему этому требование соблюдения правильной техники движений. Результат может привести в замешательство уже в первые недели. Один атлет будет уверенно прогрессировать, а другой – возможно и получит какой-то результат, но незначительный.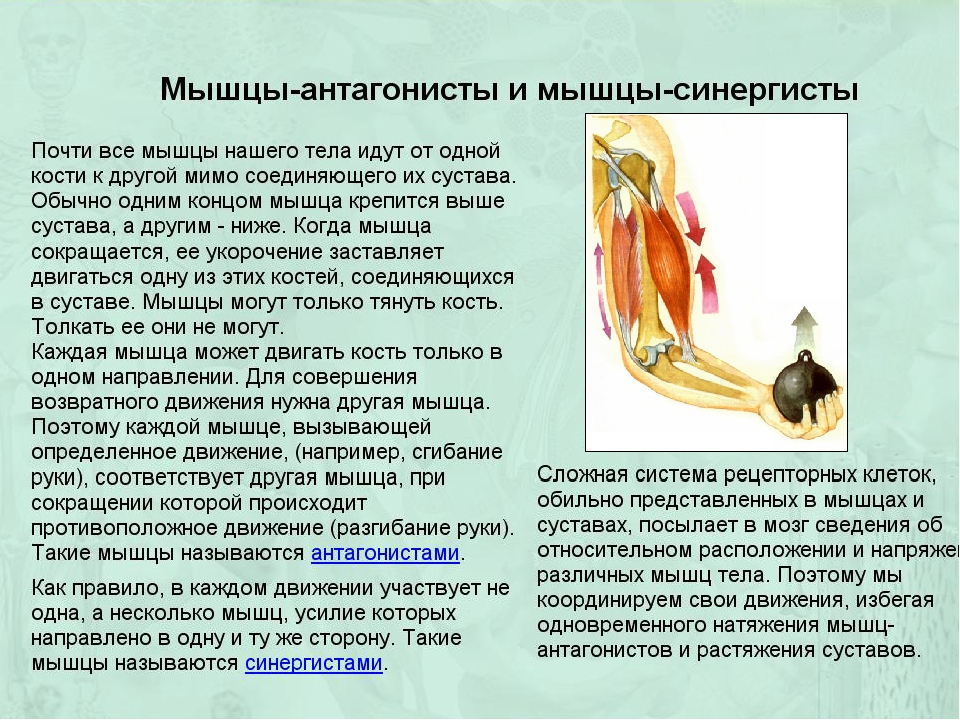 Скорее, второй атлет останется на прежнем месте, а в дальнейшем вгонит себя в состояние перетренированности.
Скорее, второй атлет останется на прежнем месте, а в дальнейшем вгонит себя в состояние перетренированности.
Таким образом, очевидно, что восстановительная способность у спортсменов разная, и дело даже не в количестве отдыха или сна. Просто атлеты имеют индивидуальный гормональный фон, различную скорость восстановления аденозинтрифосфорной кислоты, гликогена и самих мышечных волокон. Исходя из этого, второй спортсмен может поменять направление с тренировок антагонистов на работу синергистов и в дальнейшем прогрессировать так же быстро, как и первый спортсмен.
КАК ГРАМОТНО СОСТАВИТЬ ПРОГРАММУ
Зная собственную предрасположенность к работе антагонистов и синергистов, важно понять простое правило составления очерёдности упражнений, которое в дальнейшем поможет создать собственную программу.
В любой классической схеме тренировка начинается с выполнения упражнений на большие мышечные группы – широчайшие мышцы спины, грудные мышцы, квадрицепс и бицепс бедра.
Тренируя большую мышцу-синергиста, помните, что одновременно с ней “подрабатывает” и малая (второстепенная), которая быстро забивается. Поэтому целесообразно работать с малой именно в конце тренировки, а не наоборот. В противном случае, к примеру, утомлённый бицепс не даст полноценно и качественно проработать широчайшую мышцу спины в подтягиваниях, а трицепс – грудную мышцу в жимах.
В случае с антагонистами имеет смысл раздробить недельный сплит на тренировку спины, груди и ног в начале недели, и завершить работой на бицепсы и трицепсы — в конце.
Можно ещё сильнее разбить недельную программу, выделив по одному дню на каждую мышечную группу. Такой вариант сплита позволит лучше проработать конкретную мышцу, сделав акцент на её отдельных пучках.
Резюмируя вышесказанное, антагонисты и синергисты – это условное разделение мышц на группы с целью составления правильной (читать, подходящей для вас) программы.
Мышцы антагонисты и синергисты: функционирование и пример
Для каждого действия должна быть равная и противоположная реакция. Это верно и для мускулов. Возможно, самое большое недоразумение в том, как скелетные мышцы функционируют, касается их особой роли. Большинство людей думают, мускулы выполняют одну определённую роль и что они всегда выполняют только эту особенную роль. Это не так. Мускулы должны работать вместе, чтобы производить различные движения и роль конкретного мускула могла измениться в зависимости от движения.
Синергия и синергисты
Самым важным аспектом в понимании того, как мускулы функционируют для создания совместного движения является синергия. Синергия означает, что две или более единицы работают вместе, чтобы добиться результата. Работая вместе, весь результат будет больше, чем сумма отдельных эффектов вовлечённых агентов. Даже самое простое совместное движение требует, чтобы мускулы работали вместе в этом синергетическом или совместном режиме. Когда группа органов работает вместе, чтобы оптимально выполнять заданную моторную задачу, это называется синергией мышц.
Обычно сокращающиеся органы, что непосредственно участвуют в создании определённого совместного движения, называются агонистами и те, которые косвенно связаны какой-то другой ролью, называются синергистами. Однако, даже если мускул действует прямо к движению сустава, добавляя собственный крутящий момент, его все же можно корректно называть «синергистом». Другие мускулы, такие как стабилизаторы, нейтрализаторы и фиксаторы, которые помогают движению, противодействуя нежелательному перемещению или помогая стабилизировать сустав также являются синергистами.
Другие мускулы, такие как стабилизаторы, нейтрализаторы и фиксаторы, которые помогают движению, противодействуя нежелательному перемещению или помогая стабилизировать сустав также являются синергистами.
Синергисты и антагонисты: интересное объяснение на примерах ждёт на строчках ниже.
Антагонисты
Антагонист – способный противостоять движению сустава, создавая крутящий момент, что противоположен определённому совместному действию. Обычно этот сокращающийся орган, расположенная на противоположной стороне сустава от агониста. Трицепс является антагонистом для сгибания локтя, и также было бы правильно сказать, что трицепс является антагонистом бицепса и наоборот.
Антагонисты и синергисты
Пояснение на примере основных пар антагонистов:
- Грудные – спина.
- Бицепс – трицепс.
- Квадрицепс – бицепс бедра.
Представьте как вы двигаете рукой. Если вы согнёте руку в локте, один мускул будет тянуться, чтобы поднять руку. Другая мышца работает в тандеме, расслабляясь, уравновешивает первую. Когда вы расслабляете руку, мускулы принимают противоположные функции, чтобы выпрямить руку. Эти противоположности называются агонистическими мышцами или органами, что сокращаются и производят движение через сжатие.
Другая мышца работает в тандеме, расслабляясь, уравновешивает первую. Когда вы расслабляете руку, мускулы принимают противоположные функции, чтобы выпрямить руку. Эти противоположности называются агонистическими мышцами или органами, что сокращаются и производят движение через сжатие.
Мышцы антагонисты, в свою очередь, представляют собой мускулы, которые обеспечивают противоположность движению агонистов. Иногда антагонистические мышцы контролируют и замедляют движение
Когда вы сжимаете бицепс и мышцы, чтобы сгибать руку, бицепс выполняет основное движение, и поэтому это агонист. На нижней стороне плеча есть ещё один мускул, называемая трицепсом. Трицепс в этом случае является антагонистической мышцей, расслабляет и обеспечивает управление движением, в то время как бицепс выполняет основное сокращение и перемещение. Антагонист в человеческом теле, как и антагонист в романе, работает противоположно главному герою, что в этом случае является агонистической мышцей, которая предпринимает основное действие движения.
В теле есть ещё несколько примеров антагонистических мускулов. Первый пример довольно прост: что произойдёт, если мы протянем руку и расслабимся, чтобы она была прямая? За это отвечает бицепс. Но как бицепс стал антагонистом, когда он был агонист в первом примере? Когда у нас есть два мускула, выполняющие противоположные действия, мышцы изменяются от агониста до антагониста в зависимости от того, кто выполняет действие. Какой мускул выполнял тянущее действие, чтобы вытянуть руку? Трицепс! Это делает трицепс агонистом, когда вы протягиваете руку прямо. И, одновременно, бицепс становится антагонистом для этого конкретного действия.
Какие другие иллюстрирования мышц антагонистов можно найти во всем теле? В наших ногах есть антагонисты, такие как икроножная, большая мышца.
Мускулы, которые тянутся, чтобы согнуть ногу в колене являются агонистами, и стают антагонистами, когда нога выпрямляется.

Примеры основных пар мускулов синергистов:
- Спина – бицепсы.
- Трицепсы – грудные мускулы.
- Ноги – ягодицы.
Мышцы синергисты помогают нейтрализовать дополнительное движение от агонистов, чтобы убедиться, что созданная сила работает в пределах желаемой плоскости движения. Они стабилизируют мышечные движения и сохраняют их. Работая синергетически, мускулы также уменьшают объем работы, которую они должны выполнять, что может повысить выносливость.
Иногда синергетические мускулы также составляют часть группы фиксаторов и необходимы для облегчения фиксации. Крайне важно использовать эти фиксаторы для фиксации определённых суставов, чтобы другие могли эффективно перемещаться. Например, фиксация запястий при полном сгибании пальцев в кулак.
Мышцами синергистами являются трапециевидная и дельтовидная мышца для подъёма рук, ягодичные сокращающиеся органы во время бега, а также задние дельтовидные и двуглавая мышца плеча во время гребли.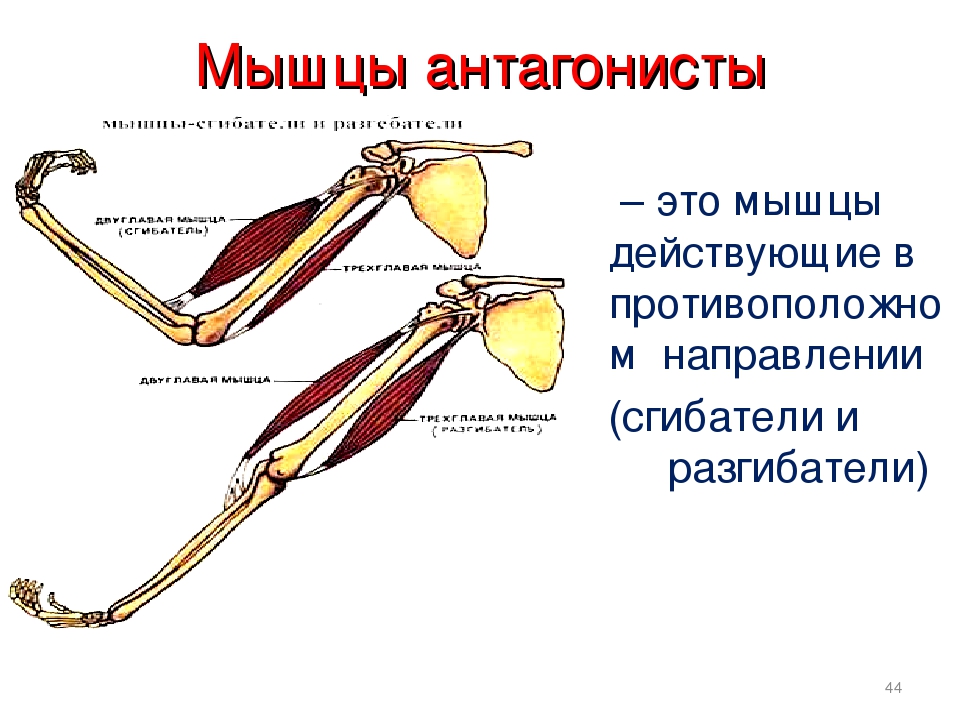
Пример двух мускулов синергистов работающих независимо: при развитии только бицепса ваша задняя дельта не будет значительным носителем нагрузки, как в движении «гребля».
Мышцы антагонисты и синергисты таблица анатомия
Мышцы-синергисты: примеры и описание
Все физические действия, которые выполняет человек, совершаются благодаря мышцам. Все они делятся на несколько групп и называются синергисты, агонисты, антагонисты, пронаторы, супинаторы. Мышцы совершают перемещения во всех суставах, удерживают тело в вертикальном положении, обеспечивают движение рук и ног.
Какие мышцы синергисты, а какие агонисты и антагонисты, можно понять, если вспомнить, какие они выполняют функции и где находятся.
Вторая группа – это произвольная мускулатура. В ее состав входят свыше 600 мышц, и они могут сокращаться по воле сознания. К ним относится поверхностная мускулатура тела человека (кроме сердечной).
Функции
По выполняемым функциям все мускулы совершают следующие виды движений: сгибание, разгибание, отведение, приведение, пронацию, супинацию.
Каждое действие обеспечивается работой нескольких мышечных волокон. Они могут взаимодействовать между собой и согласованно выполнять определенную работу.
Практически все мускулы крепятся к одному или нескольким суставам. Благодаря этому свойству обеспечивается их движение.
Обычно сгибатели находятся спереди (это бицепс, прямая мышца живота, дельта), разгибатели сзади (трицепс, разгибатели спины, ягодичные мышцы). Исключение – коленный и голеностопный суставы. Здесь мышцы расположены наоборот, квадрицепс спереди, бицепс бедра сзади.
Мышцы, обеспечивающие движение отведение, расположены снаружи от сустава (средний пучок дельты, средняя ягодичная), а приведение — внутри (приводящие мышцы бедра).
Вращение осуществляется мышцами, расположенными по диагонали или поперек от вертикальной оси.
Взаимодействие
Ни одно физическое упражнение или действие не совершается изолированно одной мышцей. В работе всегда принимают участие несколько мышечных волокон.
В работе всегда принимают участие несколько мышечных волокон.
В зависимости от вида взаимодействия различают несколько групп: мышцы-синергисты, агонисты, антагонисты. Вращение обеспечивается пронаторами (вращение внутрь) и супинаторами (наружу).
Если в движении участвует несколько мышц и они совершают действие вместе (например, сгибание), то их называют мышцы-агонисты.
Мускулы, участвующие в противоположном действии, называются антагонистами.
Мышцы-синергисты – это отдельно взятые мускулы, совершающие совместное действие с другими в одном конкретном движении.
Рассмотрим пример. В тяге участвуют мышцы-синергисты. Некоторые из них работают вместе и тянут в одну сторону, а другие совершают другое движение, стабилизируют тягу противоположного направления.
Чтобы понять, какие мышцы агонисты, а какие антагонисты, нужно вспомнить их основные группы.
Мышцы тела человека
Все тело человека можно разделить на несколько групп. Это мышцы туловища, головы, верхней и нижней конечностей. Они могут произвольно сокращаться, выполняя какое-либо действие.
Они могут произвольно сокращаться, выполняя какое-либо действие.
Тело можно разделить на мышцы:
- шеи — участвуют в движении головы;
- груди – большая и малая грудная, межреберные мышцы;
- живота – прямая, наружная и внутренняя косые;
- спины – трапециевидная, широчайшая.
Стоит отметить еще одну мышцу туловища – диафрагму. Она делит грудную и брюшную полости, участвует в дыхании.
Мышцы верхней конечности – это бицепс и трицепс.
Мышцы нижней конечности – четырехглавая, бицепс бедра.
Перечисленные мускулы далеко не все, а только самые крупные. С их помощью можно понять механизм работы агонистов и антагонистов.
К этой группе относятся:
- бицепс – трицепс;
- грудь – спина;
- бицепс бедра – квадрицепс;
- мышца, выпрямляющая позвоночник – прямая мышца живота.
В этих парах одна из групп выполняет движение сгибание, вторая — разгибание. Грудь — спина — многосуставное движение, жим и тяга.
Синергисты
К этой группе относятся:
- подтягивания – широчайшая мышца, бицепс;
- отжимания – большая грудная, трицепс;
- отжимания на брусьях – большая грудная, передний пучок дельтовидной мышцы, трицепс;
- приседания – квадрицепс, большая ягодичная, бицепс бедра.
Все мышцы-синергисты выполняют одно движение, помогая друг другу.
Расположение
Агонисты и антагонисты обычно расположены с разных сторон сустава (бицепс и трицепс). Сгибание плеча, когда работает бицепс (агонист), может привести к расслаблению трицепса (антагониста). Такое явление называется взаимным торможением.
Мышцы-синергисты расположены там же, где и агонисты, или где-то рядом. При выполнении движения помогают им.
Пронаторы, супинаторы
Вращение внутрь в плечевом суставе обеспечивается большой грудной, широчайшей, подлопаточной и большой круглой.
Вращение наружу в плечевом суставе происходит благодаря подостной и малой круглой.
Применение в жизни
Знание особенностей работы мускулатуры человека широко используется в бодибилдинге. Например, при построении тренировочной программы с использованием такой методики, как суперсерия, иногда используются мышцы-синергисты. Примеры: подтягивания и сгибания на бицепс, жим штанги и разгибание предплечья. В работе участвуют сонаправленно действующие мускулы.
Например, при построении тренировочной программы с использованием такой методики, как суперсерия, иногда используются мышцы-синергисты. Примеры: подтягивания и сгибания на бицепс, жим штанги и разгибание предплечья. В работе участвуют сонаправленно действующие мускулы.
Но чаще всего применяется тренинг, в котором участвуют антагонисты. Например, трицепс и бицепс, грудь и спина, квадрицепс и бицепс бедра.
Обычно тренировка антагонистов происходит одновременно. Такой подход обеспечивает равномерный мышечный рост и развитие.
Тренировка будет максимально эффективной, если знать, какие мышечные группы участвуют в том или ином упражнении. Опыт спортсменов доказывает пользу тренинга, в котором одновременно работают антагонисты или мышцы-синергисты. Примеры – выдающийся бодибилдер Арнольд Шварценеггер и другие.
Мышцы агонисты, антагонисты и синергисты – что это такое
Сложное строение мышечной системы человека обладает рядом функций, в частности, двигательной. Мышцы, покрывающие скелет, выполняют различные движения в процессе жизнедеятельности, в том числе физические упражнения.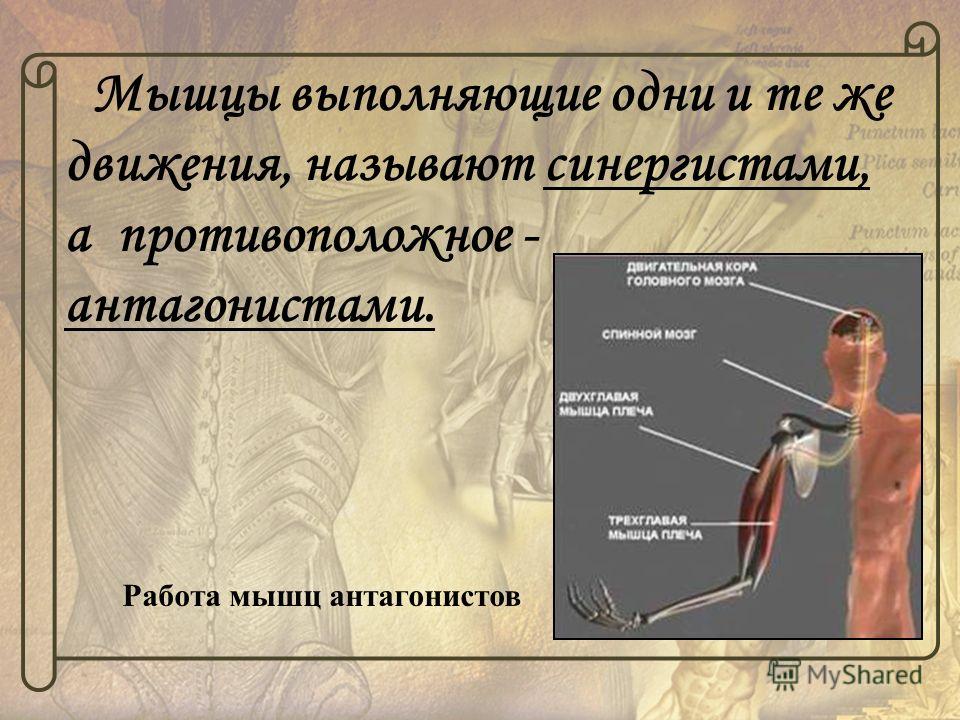 В процессе нагрузки одна мышца не может работать в одиночку, она является только частью взаимодействия нескольких мышечных групп. Знание понятий: агонист, антагонист и синергист, позволят разобраться в системе мышечной связи при выполняемых нагрузках и правильно составлять программы тренировок.
В процессе нагрузки одна мышца не может работать в одиночку, она является только частью взаимодействия нескольких мышечных групп. Знание понятий: агонист, антагонист и синергист, позволят разобраться в системе мышечной связи при выполняемых нагрузках и правильно составлять программы тренировок.
Что это такое мышцы агонисты, антагонисты и синергисты
Агонисты – скелетные мышцы, которые выполняют основное движение в определенном упражнении. То есть агонистом может быть любая мышца, для ее определения необходимо конкретное движение. Например, сгибание рук в локтевом суставе, в этом случае агонистом выступает двуглавая мышца плеча.
Антагонисты – это мышцы, выполняющие противодействие агонистам. Если агонистом при сгибании руки выступает бицепс, то при разгибании антагонистом будет выступать трицепс. Но так же может быть в точности наоборот. В движениях при разгибании агонистом будет трицепс, а бицепс – его антагонистом. Мышцы меняются ролями только относительно движения.
Синергисты – эти мышцы выступают помощниками агонистов при движении, забирая часть нагрузки на себя, либо являются стабилизаторами (фиксаторами) положения. Ни одна мышца не может сокращаться изолированно, в помощь всегда включаются дополнительные, как наружные мышцы, так и внутренние – глубокие мышцы.
Примеры мышц антагонистов
Перечень основных внешних групп антагонистов, которые работают в силовых упражнениях:
- Двуглавая мышца плеча – трехглавая мышца плеча.
- Локтевая – плечевая.
- Четырехглавая мышца бедра – двуглавая мышца бедра.
- Грудные мышцы – мышцы спины.
- Мышцы, отводящие бедра – приводящие мышцы.
- Мышцы сгибатели туловища – мышцы разгибатели спины.
Также и головки одной мышцы могут выступать антагонистами, например, передний и задний пучок дельтовидной мышцы. Передний пучок задействуется при выталкивании корпуса в отжиманиях, жимах, и приводит руки перед собой, то задний пучок, наоборот, отводит, задействуется при тягах, то есть выполняет противоположное движение.
Примеры мышц синергистов
В каждом упражнении у целевой мышцы есть свой помощник или фиксатор. Примеры:
- В изолирующем односуставном упражнении на сгибание рук, синергистом бицепса выступает плечевая мышца, которая сгибает предплечье.
- При разгибании рук синергистом трицепса является локтевая мышца, разгибающая предплечье.
- В жиме лежа целевыми являются грудные мышцы, в то время как их синергистами выступают трицепсы. В этом случае мышцы задней поверхности плеча забирают часть нагрузки с грудных, разгибают руки в плечевом и локтевом суставе.
- Синергистами мышц спины выступают бицепсы, например, при тяговых движениях забирают часть нагрузки и сгибают руки.
- В случае такого многосуставного упражнения, как приседания, для мышц разгибателей бедра – квадрицепса, синергистом являются ягодичные мышцы, которые участвуют в разгибании туловища (в динамике). Но так же их синергистами будут мышцы живота и поясничные разгибатели, которые выполняют стабилизирующую функцию, находясь в статике, и удерживают позвоночник в правильном положении.
Как лучше тренировать мышцы синергисты и антагонисты
Существует несколько вариантов выполнения программ, построенных по принципам взаимодействия мышц, с учетом физической подготовки.
1. Тренировка на целевые группы (агонисты)
Новичкам для того, чтобы не перегружать мышцы более чем одним упражнением, в один день подбираются определенные агонисты.
- Например, квадрицепсы, спина, трицепсы, передняя и средняя дельта, прямая мышца живота.
- Тогда на следующем занятии тренируются их антагонисты: бицепсы бедра, грудные, бицепсы плеча, разгибатели позвоночника, задние дельты.
Таким образом, получается два тренировочных комплекса. Первый день можно выполнять третий раз за неделю, а 2 день переносить на следующую неделю.
По мере привыкания к нагрузкам необходимо усложнять мышцам задачу, и выполнять более одного упражнения на определенные группы.
2. Сплит тренировки мышц синергистов
Сначала выполняются упражнения на крупные группы, потом идет работа уже утомленных мелких мышц синергистов.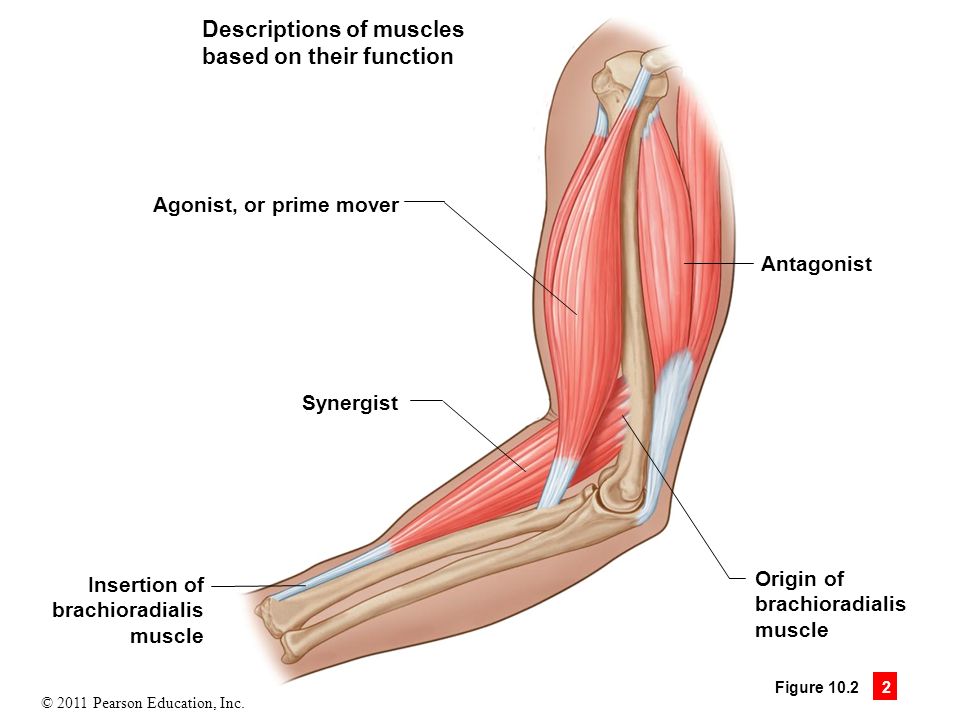 Три тренировочных дня достаточно, чтобы проработать все мышцы за неделю.
Три тренировочных дня достаточно, чтобы проработать все мышцы за неделю.
- День 1. Ноги с плечами (4-6 упражнений на квадрицепсы и бицепсы бедра, 2-3 на дельты).
- День 2. Грудь (3 упражнения) – трицепс (2 упражнения).
- День 3. Спина (3 упражнения) – бицепс (2 упражнения).
3. Тренировка антагонистов
Метод подходит для более подготовленных спортсменов, когда за одну тренировку прорабатывается определенная группа и ее противник. Каждая группа мышц выполняет одинаковое количество упражнений с антагонистом. Такой способ уже сложнее, так как антагонистом крупной мышцы является также крупная группа, к примеру, грудь – спина.
Пока агонист расходует энергию, антагонисту остается меньше сил, хотя для его работы необходимо не меньше усилий. Новичкам выполнять такие нагрузки сложнее, на первой группе мышц запасы энергии истощаются в достаточном количестве, а для качественной проработки второй группы просто не хватает сил. В связи с этим к нагрузке по этому принципу стоит приступать подготовленными атлетам.
В связи с этим к нагрузке по этому принципу стоит приступать подготовленными атлетам.
- День 1. Мышцы ног (квадрицепсы, бицепсы бедра).
- День 2. Плечи (все пучки, по два упражнения на каждый).
- День 3. Спина – грудь (по 3 упражнения на каждую группу).
- День 4. Бицепс – трицепс (по 3 упражнения на каждую мышцу).
Каждая схема тренировок переносится всеми по-разному, поэтому ее следует подбирать индивидуально, прислушиваясь к отклику собственных мышц.
Заключение
Знание строения и взаимодействия собственных мышц позволит правильно распределить на них нагрузку. Это поможет развивать симметричную и красивую форму. В силовых тренировках важно добиваться пропорций, а не утомлять одну-две, на вид отстающие или привлекающие внимание, мышцы.
Видео о мышцах антагонистах
Мышцы антагонисты и синергисты таблица 8 класс
Строение мышц, биология мышцы
Мышцы — активная часть опорно-двигательного аппарата. Сокращаясь, они приводят в движение костные рычаги: совершаются движения, благодаря чему тело и его части перемещаются в пространстве.
Сокращаясь, они приводят в движение костные рычаги: совершаются движения, благодаря чему тело и его части перемещаются в пространстве.
Строение мышцы
Мышцы состоят из многочисленных мышечных волокон, которые образуют брюшко мышцы. Выделяют головку и хвост мышцы: головка соединена с неподвижным элементом, а хвост при сокращении мышцы притягивает подвижную часть скелета.
В разделе мышечные ткани мы подробно изучили строение поперечно-полосатой мышечной ткани, благодаря которой у нас есть возможность совершать произвольные движения (под контролем сознания.) Поперечно-полосатая мышечная ткань состоит из длинных многоядерных волокон — миосимпластов, обладающих поперечной исчерченностью за счет элементарной единицы — саркомера. Соединяясь друг с другом, саркомеры образуют миофибриллы, входящие в состав миосимпласта.
Антагонисты и синергисты
Среди мышц различают мышцы-антагонисты и мышцы-синергисты. Мышцы-антагонисты (от греч. antagonistes — противник) представляют группы мышц, которые располагаются параллельно друг другу и, сокращаясь, приводят костные рычаги в противоположно-направленное действие. Проще говоря — одни сгибают, а другие разгибают конечность. Наиболее яркий пример мышц-антагонистов: бицепс и трицепс.
Проще говоря — одни сгибают, а другие разгибают конечность. Наиболее яркий пример мышц-антагонистов: бицепс и трицепс.
Мышцы-синергисты (от греч. synergos — вместе действующий) — мышцы, действующие совместно для осуществления определенного движения. Примером таких мышц может служить плечевая и двуглавая (бицепс) мышцы.
Работа и утомление мышц
Как мышцы «узнают» когда, как и с какой силой, им нужно сократиться? Задумайтесь — одной и той же мышцей мы можем совершить плавное и медленное движение, а можем быстрое и резкое. Все определяется частотой нервных импульсов, которые идут к мышце от двигательных нейронов, расположенных в передних рогах спинного мозга.
Двигательное нервное волокно оканчивается на мышце нервно-мышечным синапсом, с помощью которого возбуждение передается многим мышечным волокнам. Сила сокращения мышцы есть сумма сокращений отдельных мышечных волокон в ней. То есть сила, с которой сокращается мышца, зависит от количества возбужденных (и, как следствие, сокращающихся) мышечных волокон.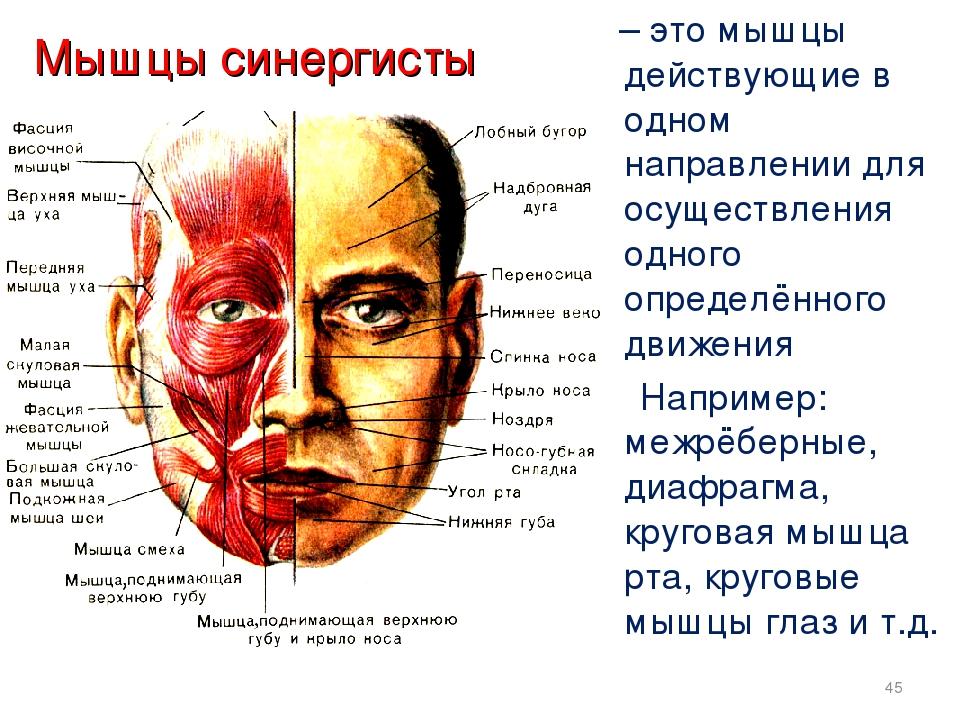
Поперечно-полосатая мускулатура характеризуется возможностью утомления — временного понижения работоспособности мышцы. Скорость наступления утомления зависит от состояния нервной системы, ритма работы, величины нагрузки на мышцу.
В мышцах у человека и животных откладывается гликоген — запасное питательное вещество. Гликоген представляет собой большую сильно разветвленную молекулу, состоящую из остатков глюкозы. Такая большая структура хорошо удерживается в клетке, а благодаря ее разветвлениям одновременно от нее могут отщепляться несколько молекул глюкозы, что весьма важно при интенсивной работе.
При физической нагрузке от гликогена отщепляются молекулы глюкозы. Это анаэробный вариант расщепления глюкозы, при котором образуется 2 молекулы АТФ из одной глюкозы. Образовавшаяся молочная кислота вызывает характерное жжение и боль в мышцах, затем она подвергается аэробному окислению до углекислого газа и воды — в ходе этого выделяется 36 молекул АТФ.
Таким образом, суммарный выход АТФ с одной молекулы глюкозы равен 38 АТФ.
Болезни мышечной системы
При чрезмерной нагрузке существует риск разрыва мышцы, либо отрыва сухожилия. Эти состояния можно заподозрить на основании данных внешнего осмотра: при разрыве мышцы образуется гематома (скопление крови в мягких тканях), при отрыве сухожилия мышцы и попытке ее сокращения, образуется характерное полушаровидное выпяичвание.
Помните о законе средних нагрузок мышц, который открыл И.М. Сеченов! Он гласит, что максимальная эффективность в работе мышц достигается при средних нагрузка (не слишком легких, и не слишком тяжелых). Рационально оценивайте собственные силы и возможности, и всегда начинайте спортивную тренировку с разминки 😉
© Беллевич Юрий Сергеевич 2018-2020
Данная статья написана Беллевичем Юрием Сергеевичем и является его интеллектуальной собственностью. Копирование, распространение (в том числе путем копирования на другие сайты и ресурсы в Интернете) или любое иное использование информации и объектов без предварительного согласия правообладателя преследуется по закону. Для получения материалов статьи и разрешения их использования, обратитесь, пожалуйста, к Беллевичу Юрию.
Для получения материалов статьи и разрешения их использования, обратитесь, пожалуйста, к Беллевичу Юрию.
Мышцы агонисты, антагонисты и синергисты – что это такое
Сложное строение мышечной системы человека обладает рядом функций, в частности, двигательной. Мышцы, покрывающие скелет, выполняют различные движения в процессе жизнедеятельности, в том числе физические упражнения. В процессе нагрузки одна мышца не может работать в одиночку, она является только частью взаимодействия нескольких мышечных групп. Знание понятий: агонист, антагонист и синергист, позволят разобраться в системе мышечной связи при выполняемых нагрузках и правильно составлять программы тренировок.
Что это такое мышцы агонисты, антагонисты и синергисты
Агонисты – скелетные мышцы, которые выполняют основное движение в определенном упражнении. То есть агонистом может быть любая мышца, для ее определения необходимо конкретное движение. Например, сгибание рук в локтевом суставе, в этом случае агонистом выступает двуглавая мышца плеча.
Антагонисты – это мышцы, выполняющие противодействие агонистам. Если агонистом при сгибании руки выступает бицепс, то при разгибании антагонистом будет выступать трицепс. Но так же может быть в точности наоборот. В движениях при разгибании агонистом будет трицепс, а бицепс – его антагонистом. Мышцы меняются ролями только относительно движения.
Синергисты – эти мышцы выступают помощниками агонистов при движении, забирая часть нагрузки на себя, либо являются стабилизаторами (фиксаторами) положения. Ни одна мышца не может сокращаться изолированно, в помощь всегда включаются дополнительные, как наружные мышцы, так и внутренние – глубокие мышцы.
Примеры мышц антагонистов
Перечень основных внешних групп антагонистов, которые работают в силовых упражнениях:
- Двуглавая мышца плеча – трехглавая мышца плеча.
- Локтевая – плечевая.
- Четырехглавая мышца бедра – двуглавая мышца бедра.
- Грудные мышцы – мышцы спины.

- Мышцы, отводящие бедра – приводящие мышцы.
- Мышцы сгибатели туловища – мышцы разгибатели спины.
Также и головки одной мышцы могут выступать антагонистами, например, передний и задний пучок дельтовидной мышцы. Передний пучок задействуется при выталкивании корпуса в отжиманиях, жимах, и приводит руки перед собой, то задний пучок, наоборот, отводит, задействуется при тягах, то есть выполняет противоположное движение.
Примеры мышц синергистов
В каждом упражнении у целевой мышцы есть свой помощник или фиксатор. Примеры:
- В изолирующем односуставном упражнении на сгибание рук, синергистом бицепса выступает плечевая мышца, которая сгибает предплечье.
- При разгибании рук синергистом трицепса является локтевая мышца, разгибающая предплечье.
- В жиме лежа целевыми являются грудные мышцы, в то время как их синергистами выступают трицепсы. В этом случае мышцы задней поверхности плеча забирают часть нагрузки с грудных, разгибают руки в плечевом и локтевом суставе.

- Синергистами мышц спины выступают бицепсы, например, при тяговых движениях забирают часть нагрузки и сгибают руки.
- В случае такого многосуставного упражнения, как приседания, для мышц разгибателей бедра – квадрицепса, синергистом являются ягодичные мышцы, которые участвуют в разгибании туловища (в динамике). Но так же их синергистами будут мышцы живота и поясничные разгибатели, которые выполняют стабилизирующую функцию, находясь в статике, и удерживают позвоночник в правильном положении.
Как лучше тренировать мышцы синергисты и антагонисты
Существует несколько вариантов выполнения программ, построенных по принципам взаимодействия мышц, с учетом физической подготовки.
1. Тренировка на целевые группы (агонисты)
Новичкам для того, чтобы не перегружать мышцы более чем одним упражнением, в один день подбираются определенные агонисты.
- Например, квадрицепсы, спина, трицепсы, передняя и средняя дельта, прямая мышца живота.
- Тогда на следующем занятии тренируются их антагонисты: бицепсы бедра, грудные, бицепсы плеча, разгибатели позвоночника, задние дельты.

Таким образом, получается два тренировочных комплекса. Первый день можно выполнять третий раз за неделю, а 2 день переносить на следующую неделю.
По мере привыкания к нагрузкам необходимо усложнять мышцам задачу, и выполнять более одного упражнения на определенные группы.
2. Сплит тренировки мышц синергистов
Сначала выполняются упражнения на крупные группы, потом идет работа уже утомленных мелких мышц синергистов. Три тренировочных дня достаточно, чтобы проработать все мышцы за неделю.
- День 1. Ноги с плечами (4-6 упражнений на квадрицепсы и бицепсы бедра, 2-3 на дельты).
- День 2. Грудь (3 упражнения) – трицепс (2 упражнения).
- День 3. Спина (3 упражнения) – бицепс (2 упражнения).
3. Тренировка антагонистов
Метод подходит для более подготовленных спортсменов, когда за одну тренировку прорабатывается определенная группа и ее противник. Каждая группа мышц выполняет одинаковое количество упражнений с антагонистом. Такой способ уже сложнее, так как антагонистом крупной мышцы является также крупная группа, к примеру, грудь – спина.
Такой способ уже сложнее, так как антагонистом крупной мышцы является также крупная группа, к примеру, грудь – спина.
Пока агонист расходует энергию, антагонисту остается меньше сил, хотя для его работы необходимо не меньше усилий. Новичкам выполнять такие нагрузки сложнее, на первой группе мышц запасы энергии истощаются в достаточном количестве, а для качественной проработки второй группы просто не хватает сил. В связи с этим к нагрузке по этому принципу стоит приступать подготовленными атлетам.
- День 1. Мышцы ног (квадрицепсы, бицепсы бедра).
- День 2. Плечи (все пучки, по два упражнения на каждый).
- День 3. Спина – грудь (по 3 упражнения на каждую группу).
- День 4. Бицепс – трицепс (по 3 упражнения на каждую мышцу).
Каждая схема тренировок переносится всеми по-разному, поэтому ее следует подбирать индивидуально, прислушиваясь к отклику собственных мышц.
Заключение
Знание строения и взаимодействия собственных мышц позволит правильно распределить на них нагрузку. Это поможет развивать симметричную и красивую форму. В силовых тренировках важно добиваться пропорций, а не утомлять одну-две, на вид отстающие или привлекающие внимание, мышцы.
Это поможет развивать симметричную и красивую форму. В силовых тренировках важно добиваться пропорций, а не утомлять одну-две, на вид отстающие или привлекающие внимание, мышцы.
Видео о мышцах антагонистах
Агонисты, синергисты и антагонисты
Даны определения мышц-агонистов, мышц-синергистов и мышц-антагонистов. Показано, что при выполнении движения мышцы в одной ситуации могут быть антагонистами, а в другой – синергистами. Наличие мышц-антагонистов необходимо для выполнения двигательных действий, так как мышца может лишь тянуть костное звено при сокращении, но не может его толкать.
Агонисты, синергисты и антагонисты
Давайте продолжим разговор о различных классификациях скелетных мышц и поговорим об антагонистах, синергистах и агонистах. Эти определения я взяла из прекрасной книги Раисы Самуиловны Персон «Мышцы-антагонисты в движениях человека».
Определения
Мышцами-антагонистами называют такие две мышцы (или две группы мышц) одного сустава, которые при сокращении осуществляют тягу в противоположные стороны.
Мышцами-синергистами называют мышцы одного сустава, которые тянут в одном и том же направлении.
Из двух мышц-антагонистов ту, которая осуществляет данное движение (то есть выполняет основную задачу), называют агонистом, а другую — антагонистом.
Примеры мышц-антагонистов
Верхние конечности
1. Сгибание предплечья осуществляет двуглавая мышца плеча (m.biceps brachii), а разгибание предплечья — трехглавая мышца плеча (m. triceps brachii). Эти две мышцы являются мышцами-антагонистами, потому что они осуществляют тягу в противоположных направлениях относительно локтевого сустава. Одна мышца (двуглавая мышца плеча) отвечает за сгибание, а вторая (трехглавая мышца плеча) отвечает за разгибание.
2. Сгибание плеча (плечевой кости) осуществляют мышцы: дельтовидная (передние пучки), большая грудная мышца, клювовидно-плечевая, двуглавая мышца плеча. Разгибание плеча (плечевой кости) осуществляют мышцы-антагонисты: задняя часть дельтовидной, широчайшая мышца спины, подостная, малая круглая большая круглая, длинная головка трехглавой мышцы плеча.
Разгибание плеча (плечевой кости) осуществляют мышцы-антагонисты: задняя часть дельтовидной, широчайшая мышца спины, подостная, малая круглая большая круглая, длинная головка трехглавой мышцы плеча.
Нижние конечности
3. Сгибание голени осуществляет среди прочих двуглавая мышца бедра (m. biceps femoris), а разгибание голени — четырехглавая мышца бедра (m.quadriceps femoris). Эти две мышцы являются мышцами-антагонистами, потому что они осуществляют противоположную тягу относительно коленного сустава. Одна мышца (двуглавая мышца бедра) отвечает за сгибание, а вторая (четырехглавая мышца бедра) — отвечает за разгибание.
4. Сгибание стопы осуществляет трехглавая мышца голени (m. triceps surae) в состав которой входит икроножная мышца (m. gastrocnemius) и камбаловидная мышца (m. soleus). Разгибание стопы осуществляет передняя большеберцовая мышца (m. tibialis anterior).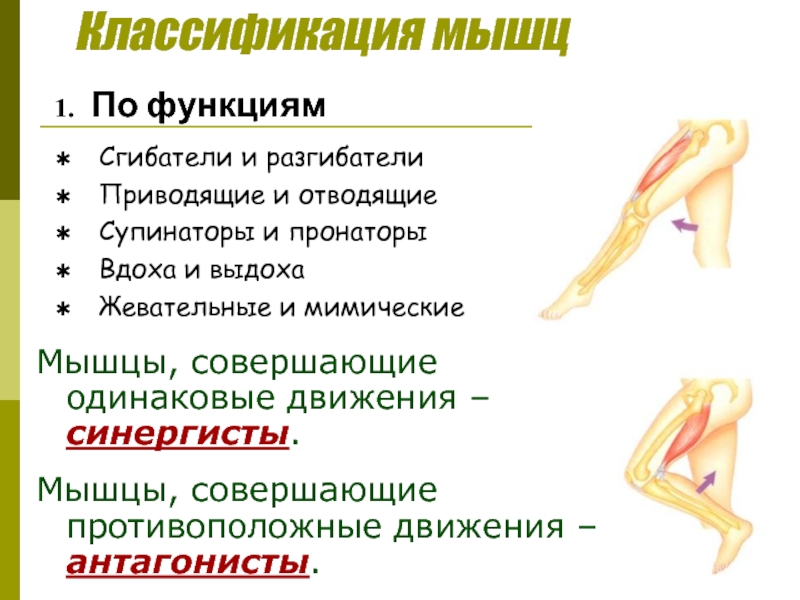 Эта мышца является антагонистом трехглавой мышце голени.
Эта мышца является антагонистом трехглавой мышце голени.
Примеры мышц-синергистов
Верхние конечности
1. Сгибание предплечья осуществляют мышцы: двуглавая мышца плеча, плечевая, плечелучевая. Это мышцы-синергисты, потому что это мышцы одного сустава, которые тянут в одном направлении (осуществляют сгибание предплечья).
Нижние конечности
2. Разгибание голени осуществляют четыре мышцы: латеральная широкая мышца бедра, медиальная широкая мышца бедра, промежуточная широкая мышца бедра, прямая мышца бедра. Это четыре головки четырехглавой мышцы бедра. Это мышцы-синергисты, так как они тянут в одном направлении (осуществляют разгибание голени).
3. Сгибание голени осуществляют мышцы: двуглавая мышца бедра, полусухожильная, полуперепончатая, портняжная, тонкая, подколенная, икроножная, подошвенная. Это мышцы-синергисты, так как они тянут в одном направлении (осуществляют сгибание голени).
4. Подошвенное сгибание стопы осуществляют: трехглавая мышца голени (икроножная и камбаловидная), подошвенная мышца, задняя большеберцовая, длинный сгибатель большого пальца, длинный сгибатель пальцев, длинная малоберцовая, короткая малоберцовая. Это мышцы-синергисты, так как они тянут в одном направлении (сгибают стопу).
Это мышцы-синергисты, так как они тянут в одном направлении (сгибают стопу).
Примеры мышц-агонистов и антагонистов
1.Сгибание предплечья осуществляет двуглавая мышца плеча (m.biceps brachii), а разгибание предплечья — трехглавая мышца плеча (m. triceps brachii). Если мы рассматриваем сгибание предплечья как основное движение, то мышцей-агонистом будет двуглавая мышца плеча (она осуществляет данное движение), а мышцей-антагонистом — трехглавая мышца плеча. Она отвечает за разгибание.
2. Рассматриваем разгибание голени. Мышцей-агонистом будет четырехглавая мышца бедра (она осуществляет данное движение). А мышцами-антагонистами будут мышцы сгибатели бедра: двуглавая мышца бедра, полусухожильная, полуперепончатая, портняжная, тонкая, подколенная, икроножная и подошвенная.
Более подробно строение и функции мышц описаны в моих книгах «Гипертрофия скелетных мышц человека» и «Биомеханика мышц«
Особенности функционирования мышц
1. Наличие мышц-антагонистов необходимо, так как мышца может лишь тянуть кость, но не может ее толкать. Поэтому, чтобы костное звено выполняло, например, сгибание и разгибание, необходимо наличие двух мышц. Одна из мышц будет отвечать за сгибание в суставе, а другая – за разгибание.
Наличие мышц-антагонистов необходимо, так как мышца может лишь тянуть кость, но не может ее толкать. Поэтому, чтобы костное звено выполняло, например, сгибание и разгибание, необходимо наличие двух мышц. Одна из мышц будет отвечать за сгибание в суставе, а другая – за разгибание.
2. При выполнении двигательных действий мышцы-антагонисты не обязательно работают попеременно. Еще в начале ХХ века немецкий ученый R. Wagner (1925) показал, что в зависимости от условий внешнего силового поля меняется соотношение фаз активности мышц-антагонистов. Полное совпадение активности мышц с перемещением наблюдается только при движениях против сил трения. При работе против сил инерции мышца-агонист активна только на протяжении первой фазы движения. Затем оно продолжается по инерции при возрастающей активности мышцы-антагониста, которая тормозит движение (рис.1).
Рис.1. Работа мышц-антагонистов против внешних сил разной природы: А-силы трения; Б — силы инерции; В — силы упругости (R.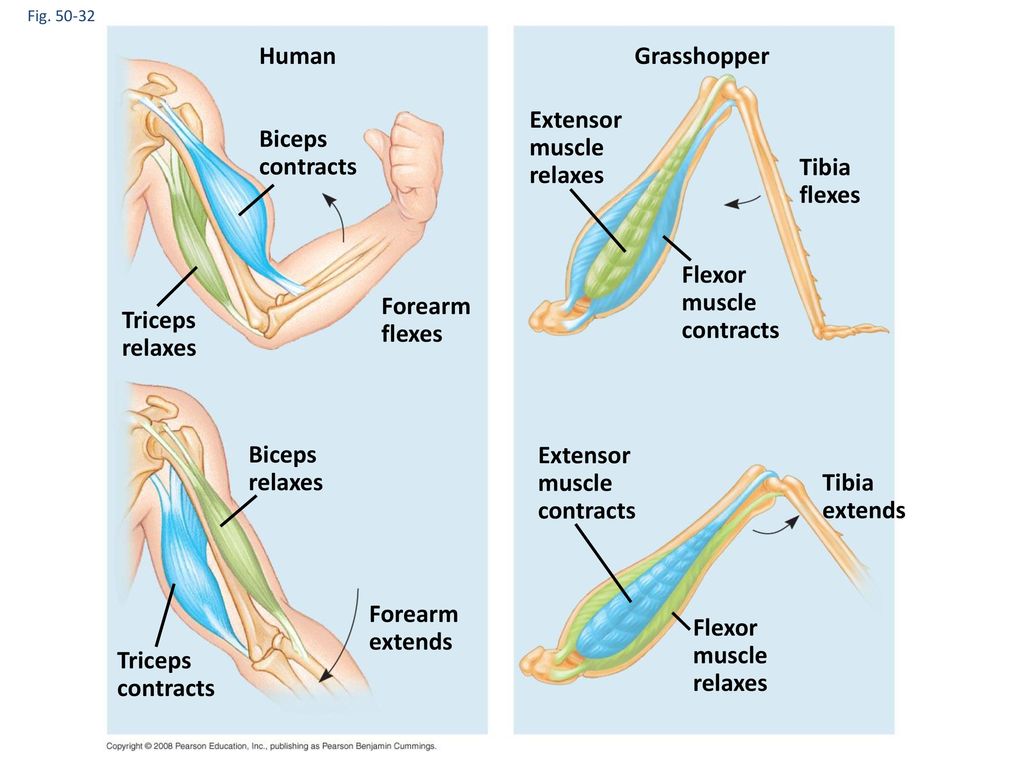 Wagner, 1925)
Wagner, 1925)
3. На активность мышц-антагонистов сильно влияет темп движений. При выполнении движения в медленном темпе активность мышц-антагонистов соответствует фазам движения, за которые они отвечают. А именно: при сгибании активность проявляют мышцы, отвечающие за сгибание, а при разгибании активность проявляют разгибатели. Увеличение темпа движения приводит к тому, что при в конце фазы сгибания может активироваться мышца-разгибатель. В данном случае мышца-разгибатель (антагонист) действует как тормоз. При быстрых движениях также существуют фазы одновременной активности мышц-антагонистов (А.В. Самсонова, 1998).
3. При выполнении движения мышцы в одной ситуации могут быть антагонистами, а в другой – синергистами. Например, двуглавая мышца плеча является синергистом мышцы круглый пронатор при сгибании предплечья. А при ротации предплечья они работают как антагонисты, так как двуглавая осуществляет супинацию предплечья, а круглый пронатор – пронацию.
Реципрокная иннервация
Для того, чтобы мышца-агонист могла выполнять свою задачу, мышца-антагонист должна быть расслаблена. На эту особенность обратил внимание еще Рене Декарт в 17 веке при анализе движений глаз. Затем исследования работы мышц-антагонистов были продолжены. Было установлено, что существует механизм, который управляет работой мышц-антагонистов в центральной нервной системе. Это механизм получил название реципрокной иннервации. Большой вклад в изучение этого механизма внес лауреат Нобелевской премии Чарльз Скот Шеррингтон (рис.2). Было установлено, что при возбуждении мышцы-агониста, ЦНС тормозит работу мышцу-антагониста (рис.3).
На эту особенность обратил внимание еще Рене Декарт в 17 веке при анализе движений глаз. Затем исследования работы мышц-антагонистов были продолжены. Было установлено, что существует механизм, который управляет работой мышц-антагонистов в центральной нервной системе. Это механизм получил название реципрокной иннервации. Большой вклад в изучение этого механизма внес лауреат Нобелевской премии Чарльз Скот Шеррингтон (рис.2). Было установлено, что при возбуждении мышцы-агониста, ЦНС тормозит работу мышцу-антагониста (рис.3).
Рис.2. Шеррингтон Ч.С.
Рис.3. Схема реципрокной иннервации мышц-антагонистов (Шеррингтон Ч.С., 1969) При поступлении двигательного импульса на мышцу (показано знаком «+») мышца-антагонист тормозится (показано знаком «-«)
Мышцы-синергисты: примеры и описание
Все физические действия, которые выполняет человек, совершаются благодаря мышцам. Все они делятся на несколько групп и называются синергисты, агонисты, антагонисты, пронаторы, супинаторы.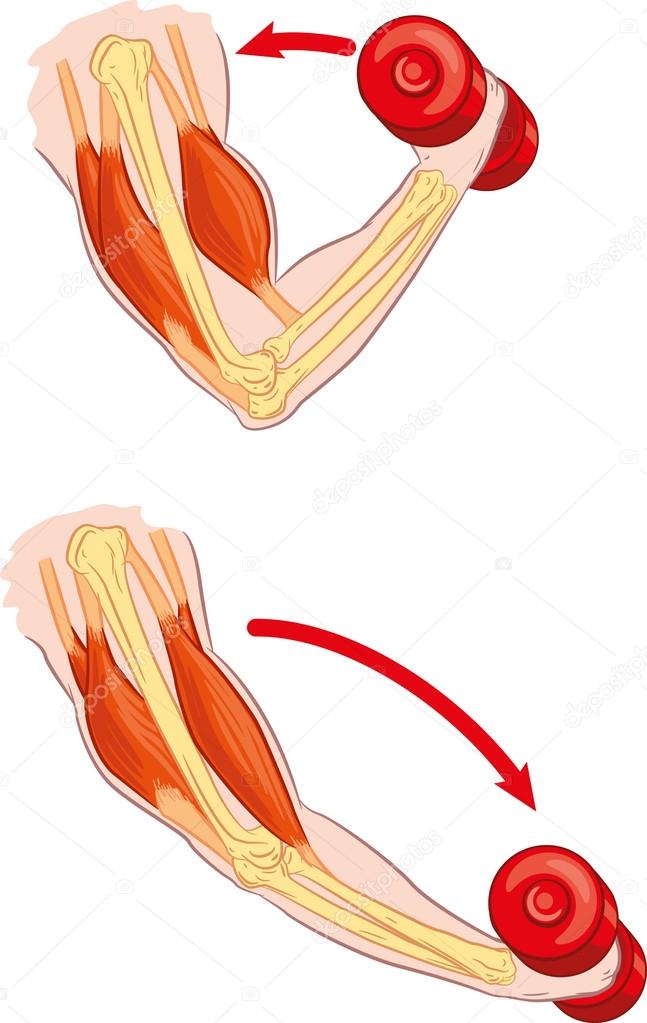 Мышцы совершают перемещения во всех суставах, удерживают тело в вертикальном положении, обеспечивают движение рук и ног.
Мышцы совершают перемещения во всех суставах, удерживают тело в вертикальном положении, обеспечивают движение рук и ног.
Какие мышцы синергисты, а какие агонисты и антагонисты, можно понять, если вспомнить, какие они выполняют функции и где находятся.
Вторая группа – это произвольная мускулатура. В ее состав входят свыше 600 мышц, и они могут сокращаться по воле сознания. К ним относится поверхностная мускулатура тела человека (кроме сердечной).
Функции
По выполняемым функциям все мускулы совершают следующие виды движений: сгибание, разгибание, отведение, приведение, пронацию, супинацию.
Каждое действие обеспечивается работой нескольких мышечных волокон. Они могут взаимодействовать между собой и согласованно выполнять определенную работу.
Практически все мускулы крепятся к одному или нескольким суставам. Благодаря этому свойству обеспечивается их движение.
Обычно сгибатели находятся спереди (это бицепс, прямая мышца живота, дельта), разгибатели сзади (трицепс, разгибатели спины, ягодичные мышцы).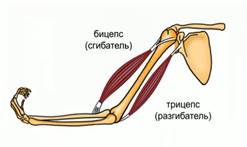 Исключение – коленный и голеностопный суставы. Здесь мышцы расположены наоборот, квадрицепс спереди, бицепс бедра сзади.
Исключение – коленный и голеностопный суставы. Здесь мышцы расположены наоборот, квадрицепс спереди, бицепс бедра сзади.
Мышцы, обеспечивающие движение отведение, расположены снаружи от сустава (средний пучок дельты, средняя ягодичная), а приведение — внутри (приводящие мышцы бедра).
Вращение осуществляется мышцами, расположенными по диагонали или поперек от вертикальной оси.
Взаимодействие
Ни одно физическое упражнение или действие не совершается изолированно одной мышцей. В работе всегда принимают участие несколько мышечных волокон.
В зависимости от вида взаимодействия различают несколько групп: мышцы-синергисты, агонисты, антагонисты. Вращение обеспечивается пронаторами (вращение внутрь) и супинаторами (наружу).
Если в движении участвует несколько мышц и они совершают действие вместе (например, сгибание), то их называют мышцы-агонисты.
Мускулы, участвующие в противоположном действии, называются антагонистами.
Мышцы-синергисты – это отдельно взятые мускулы, совершающие совместное действие с другими в одном конкретном движении.
Рассмотрим пример. В тяге участвуют мышцы-синергисты. Некоторые из них работают вместе и тянут в одну сторону, а другие совершают другое движение, стабилизируют тягу противоположного направления.
Чтобы понять, какие мышцы агонисты, а какие антагонисты, нужно вспомнить их основные группы.
Мышцы тела человека
Все тело человека можно разделить на несколько групп. Это мышцы туловища, головы, верхней и нижней конечностей. Они могут произвольно сокращаться, выполняя какое-либо действие.
Тело можно разделить на мышцы:
- шеи — участвуют в движении головы;
- груди – большая и малая грудная, межреберные мышцы;
- живота – прямая, наружная и внутренняя косые;
- спины – трапециевидная, широчайшая.
Стоит отметить еще одну мышцу туловища – диафрагму. Она делит грудную и брюшную полости, участвует в дыхании.
Мышцы верхней конечности – это бицепс и трицепс.
Мышцы нижней конечности – четырехглавая, бицепс бедра.
Перечисленные мускулы далеко не все, а только самые крупные. С их помощью можно понять механизм работы агонистов и антагонистов.
К этой группе относятся:
- бицепс – трицепс;
- грудь – спина;
- бицепс бедра – квадрицепс;
- мышца, выпрямляющая позвоночник – прямая мышца живота.
В этих парах одна из групп выполняет движение сгибание, вторая — разгибание. Грудь — спина — многосуставное движение, жим и тяга.
Синергисты
К этой группе относятся:
- подтягивания – широчайшая мышца, бицепс;
- отжимания – большая грудная, трицепс;
- отжимания на брусьях – большая грудная, передний пучок дельтовидной мышцы, трицепс;
- приседания – квадрицепс, большая ягодичная, бицепс бедра.
Все мышцы-синергисты выполняют одно движение, помогая друг другу.
Расположение
Агонисты и антагонисты обычно расположены с разных сторон сустава (бицепс и трицепс). Сгибание плеча, когда работает бицепс (агонист), может привести к расслаблению трицепса (антагониста). Такое явление называется взаимным торможением.
Мышцы-синергисты расположены там же, где и агонисты, или где-то рядом. При выполнении движения помогают им.
Пронаторы, супинаторы
Вращение внутрь в плечевом суставе обеспечивается большой грудной, широчайшей, подлопаточной и большой круглой.
Вращение наружу в плечевом суставе происходит благодаря подостной и малой круглой.
Применение в жизни
Знание особенностей работы мускулатуры человека широко используется в бодибилдинге. Например, при построении тренировочной программы с использованием такой методики, как суперсерия, иногда используются мышцы-синергисты. Примеры: подтягивания и сгибания на бицепс, жим штанги и разгибание предплечья. В работе участвуют сонаправленно действующие мускулы.
Но чаще всего применяется тренинг, в котором участвуют антагонисты. Например, трицепс и бицепс, грудь и спина, квадрицепс и бицепс бедра.
Обычно тренировка антагонистов происходит одновременно. Такой подход обеспечивает равномерный мышечный рост и развитие.
Тренировка будет максимально эффективной, если знать, какие мышечные группы участвуют в том или ином упражнении. Опыт спортсменов доказывает пользу тренинга, в котором одновременно работают антагонисты или мышцы-синергисты. Примеры – выдающийся бодибилдер Арнольд Шварценеггер и другие.
Мышцы агонисты антагонисты синергисты таблица
Мышцы-синергисты: примеры и описание
Все физические действия, которые выполняет человек, совершаются благодаря мышцам. Все они делятся на несколько групп и называются синергисты, агонисты, антагонисты, пронаторы, супинаторы. Мышцы совершают перемещения во всех суставах, удерживают тело в вертикальном положении, обеспечивают движение рук и ног.
Какие мышцы синергисты, а какие агонисты и антагонисты, можно понять, если вспомнить, какие они выполняют функции и где находятся.
Вторая группа – это произвольная мускулатура. В ее состав входят свыше 600 мышц, и они могут сокращаться по воле сознания. К ним относится поверхностная мускулатура тела человека (кроме сердечной).
Функции
По выполняемым функциям все мускулы совершают следующие виды движений: сгибание, разгибание, отведение, приведение, пронацию, супинацию.
Каждое действие обеспечивается работой нескольких мышечных волокон. Они могут взаимодействовать между собой и согласованно выполнять определенную работу.
Практически все мускулы крепятся к одному или нескольким суставам. Благодаря этому свойству обеспечивается их движение.
Обычно сгибатели находятся спереди (это бицепс, прямая мышца живота, дельта), разгибатели сзади (трицепс, разгибатели спины, ягодичные мышцы). Исключение – коленный и голеностопный суставы. Здесь мышцы расположены наоборот, квадрицепс спереди, бицепс бедра сзади.
Мышцы, обеспечивающие движение отведение, расположены снаружи от сустава (средний пучок дельты, средняя ягодичная), а приведение — внутри (приводящие мышцы бедра).
Вращение осуществляется мышцами, расположенными по диагонали или поперек от вертикальной оси.
Взаимодействие
Ни одно физическое упражнение или действие не совершается изолированно одной мышцей. В работе всегда принимают участие несколько мышечных волокон.
В зависимости от вида взаимодействия различают несколько групп: мышцы-синергисты, агонисты, антагонисты. Вращение обеспечивается пронаторами (вращение внутрь) и супинаторами (наружу).
Если в движении участвует несколько мышц и они совершают действие вместе (например, сгибание), то их называют мышцы-агонисты.
Мускулы, участвующие в противоположном действии, называются антагонистами.
Мышцы-синергисты – это отдельно взятые мускулы, совершающие совместное действие с другими в одном конкретном движении.
Рассмотрим пример. В тяге участвуют мышцы-синергисты. Некоторые из них работают вместе и тянут в одну сторону, а другие совершают другое движение, стабилизируют тягу противоположного направления.
Чтобы понять, какие мышцы агонисты, а какие антагонисты, нужно вспомнить их основные группы.
Мышцы тела человека
Все тело человека можно разделить на несколько групп. Это мышцы туловища, головы, верхней и нижней конечностей. Они могут произвольно сокращаться, выполняя какое-либо действие.
Тело можно разделить на мышцы:
- шеи — участвуют в движении головы;
- груди – большая и малая грудная, межреберные мышцы;
- живота – прямая, наружная и внутренняя косые;
- спины – трапециевидная, широчайшая.
Стоит отметить еще одну мышцу туловища – диафрагму. Она делит грудную и брюшную полости, участвует в дыхании.
Мышцы верхней конечности – это бицепс и трицепс.
Мышцы нижней конечности – четырехглавая, бицепс бедра.
Перечисленные мускулы далеко не все, а только самые крупные. С их помощью можно понять механизм работы агонистов и антагонистов.
К этой группе относятся:
- бицепс – трицепс;
- грудь – спина;
- бицепс бедра – квадрицепс;
- мышца, выпрямляющая позвоночник – прямая мышца живота.
В этих парах одна из групп выполняет движение сгибание, вторая — разгибание. Грудь — спина — многосуставное движение, жим и тяга.
Синергисты
К этой группе относятся:
- подтягивания – широчайшая мышца, бицепс;
- отжимания – большая грудная, трицепс;
- отжимания на брусьях – большая грудная, передний пучок дельтовидной мышцы, трицепс;
- приседания – квадрицепс, большая ягодичная, бицепс бедра.
Все мышцы-синергисты выполняют одно движение, помогая друг другу.
Расположение
Агонисты и антагонисты обычно расположены с разных сторон сустава (бицепс и трицепс). Сгибание плеча, когда работает бицепс (агонист), может привести к расслаблению трицепса (антагониста). Такое явление называется взаимным торможением.
Мышцы-синергисты расположены там же, где и агонисты, или где-то рядом. При выполнении движения помогают им.
Пронаторы, супинаторы
Вращение внутрь в плечевом суставе обеспечивается большой грудной, широчайшей, подлопаточной и большой круглой.
Вращение наружу в плечевом суставе происходит благодаря подостной и малой круглой.
Применение в жизни
Знание особенностей работы мускулатуры человека широко используется в бодибилдинге. Например, при построении тренировочной программы с использованием такой методики, как суперсерия, иногда используются мышцы-синергисты. Примеры: подтягивания и сгибания на бицепс, жим штанги и разгибание предплечья. В работе участвуют сонаправленно действующие мускулы.
Но чаще всего применяется тренинг, в котором участвуют антагонисты. Например, трицепс и бицепс, грудь и спина, квадрицепс и бицепс бедра.
Обычно тренировка антагонистов происходит одновременно. Такой подход обеспечивает равномерный мышечный рост и развитие.
Тренировка будет максимально эффективной, если знать, какие мышечные группы участвуют в том или ином упражнении. Опыт спортсменов доказывает пользу тренинга, в котором одновременно работают антагонисты или мышцы-синергисты. Примеры – выдающийся бодибилдер Арнольд Шварценеггер и другие.
Мышцы-синергисты: примеры и описание
Все физические действия, которые выполняет человек, совершаются благодаря мышцам. Все они делятся на несколько групп и называются синергисты, агонисты, антагонисты, пронаторы, супинаторы. Мышцы совершают перемещения во всех суставах, удерживают тело в вертикальном положении, обеспечивают движение рук и ног.
Какие мышцы синергисты, а какие агонисты и антагонисты, можно понять, если вспомнить, какие они выполняют функции и где находятся.
Вторая группа – это произвольная мускулатура. В ее состав входят свыше 600 мышц, и они могут сокращаться по воле сознания. К ним относится поверхностная мускулатура тела человека (кроме сердечной).
Функции
По выполняемым функциям все мускулы совершают следующие виды движений: сгибание, разгибание, отведение, приведение, пронацию, супинацию.
Каждое действие обеспечивается работой нескольких мышечных волокон. Они могут взаимодействовать между собой и согласованно выполнять определенную работу.
Практически все мускулы крепятся к одному или нескольким суставам. Благодаря этому свойству обеспечивается их движение.
Обычно сгибатели находятся спереди (это бицепс, прямая мышца живота, дельта), разгибатели сзади (трицепс, разгибатели спины, ягодичные мышцы). Исключение – коленный и голеностопный суставы. Здесь мышцы расположены наоборот, квадрицепс спереди, бицепс бедра сзади.
Мышцы, обеспечивающие движение отведение, расположены снаружи от сустава (средний пучок дельты, средняя ягодичная), а приведение — внутри (приводящие мышцы бедра).
Вращение осуществляется мышцами, расположенными по диагонали или поперек от вертикальной оси.
Взаимодействие
Ни одно физическое упражнение или действие не совершается изолированно одной мышцей. В работе всегда принимают участие несколько мышечных волокон.
В зависимости от вида взаимодействия различают несколько групп: мышцы-синергисты, агонисты, антагонисты. Вращение обеспечивается пронаторами (вращение внутрь) и супинаторами (наружу).
Если в движении участвует несколько мышц и они совершают действие вместе (например, сгибание), то их называют мышцы-агонисты.
Мускулы, участвующие в противоположном действии, называются антагонистами.
Мышцы-синергисты – это отдельно взятые мускулы, совершающие совместное действие с другими в одном конкретном движении.
Рассмотрим пример. В тяге участвуют мышцы-синергисты. Некоторые из них работают вместе и тянут в одну сторону, а другие совершают другое движение, стабилизируют тягу противоположного направления.
Чтобы понять, какие мышцы агонисты, а какие антагонисты, нужно вспомнить их основные группы.
Мышцы тела человека
Все тело человека можно разделить на несколько групп. Это мышцы туловища, головы, верхней и нижней конечностей. Они могут произвольно сокращаться, выполняя какое-либо действие.
Тело можно разделить на мышцы:
- шеи — участвуют в движении головы;
- груди – большая и малая грудная, межреберные мышцы;
- живота – прямая, наружная и внутренняя косые;
- спины – трапециевидная, широчайшая.
Стоит отметить еще одну мышцу туловища – диафрагму. Она делит грудную и брюшную полости, участвует в дыхании.
Мышцы верхней конечности – это бицепс и трицепс.
Мышцы нижней конечности – четырехглавая, бицепс бедра.
Перечисленные мускулы далеко не все, а только самые крупные. С их помощью можно понять механизм работы агонистов и антагонистов.
К этой группе относятся:
- бицепс – трицепс;
- грудь – спина;
- бицепс бедра – квадрицепс;
- мышца, выпрямляющая позвоночник – прямая мышца живота.
В этих парах одна из групп выполняет движение сгибание, вторая — разгибание. Грудь — спина — многосуставное движение, жим и тяга.
Синергисты
К этой группе относятся:
- подтягивания – широчайшая мышца, бицепс;
- отжимания – большая грудная, трицепс;
- отжимания на брусьях – большая грудная, передний пучок дельтовидной мышцы, трицепс;
- приседания – квадрицепс, большая ягодичная, бицепс бедра.
Все мышцы-синергисты выполняют одно движение, помогая друг другу.
Расположение
Агонисты и антагонисты обычно расположены с разных сторон сустава (бицепс и трицепс). Сгибание плеча, когда работает бицепс (агонист), может привести к расслаблению трицепса (антагониста). Такое явление называется взаимным торможением.
Мышцы-синергисты расположены там же, где и агонисты, или где-то рядом. При выполнении движения помогают им.
Пронаторы, супинаторы
Вращение внутрь в плечевом суставе обеспечивается большой грудной, широчайшей, подлопаточной и большой круглой.
Вращение наружу в плечевом суставе происходит благодаря подостной и малой круглой.
Применение в жизни
Знание особенностей работы мускулатуры человека широко используется в бодибилдинге. Например, при построении тренировочной программы с использованием такой методики, как суперсерия, иногда используются мышцы-синергисты. Примеры: подтягивания и сгибания на бицепс, жим штанги и разгибание предплечья. В работе участвуют сонаправленно действующие мускулы.
Но чаще всего применяется тренинг, в котором участвуют антагонисты. Например, трицепс и бицепс, грудь и спина, квадрицепс и бицепс бедра.
Обычно тренировка антагонистов происходит одновременно. Такой подход обеспечивает равномерный мышечный рост и развитие.
Тренировка будет максимально эффективной, если знать, какие мышечные группы участвуют в том или ином упражнении. Опыт спортсменов доказывает пользу тренинга, в котором одновременно работают антагонисты или мышцы-синергисты. Примеры – выдающийся бодибилдер Арнольд Шварценеггер и другие.
Мышечные супергерои: агонисты, антагонисты, синергисты и стабилизаторы
Что такое мышечные агонисты и антагонисты? Посмотрите короткое видео ниже и просмотрите его с небольшой помощью Бэтмена и Робина.
Мускулистые супергерои: агонисты, антагонисты, синергисты и стабилизаторы
Перемещение любого из наших синовиальных суставов требует усилий сообщества. В то время как мышцы-агонисты являются основными движущими силами сустава, есть другие мышцы, которые помогают направлять и стабилизировать это движение.Вы можете думать о мышечном сообществе, которое объединяется для движения ваших суставов, как о супергероях. Ради интереса мы будем использовать в качестве примера Бэтмена и его соратников.
Вот краткий обзор и сводка взаимоотношений мышц вокруг сустава.
Бэтмен: Агонист
Основная мышца, пытающаяся создать движение в суставе.
Джокер: антагонист
Основная мышца, выполняющая противоположное действие в суставе.
Робин: синергист
Мышцы, которые помогают агонисту выполнять то же движение.
Альфред: стабилизатор
Мышцы, которые удерживают все остальное на месте, пока агонист и синергисты пытаются выполнять свою работу.
Взаимосвязь между мышцами агониста и антагониста называется «реципрокным ингибированием».»Когда агонист сокращается, чтобы двигать суставом, антагонист автоматически расслабляется рефлекторной дугой в спинном мозге. Это хорошо, потому что в противном случае он будет бороться против движения, как Джокер сражается против Бэтмена!
Например, в такой позе йоги, как Пашчимоттанасана (наклон вперед сидя) (см. Ниже), четырехглавые мышцы являются агонистами — потому что они сокращаются — а подколенные сухожилия — антагонистами — потому что они растягиваются. Точно так же, когда мы сгибаем локоть, бицепс (мышцы-агонисты) сокращаются, а трицепсы (мышцы-антагонисты) растягиваются, позволяя согнуть локоть.(см. иллюстрацию выше)
Как эти знания нам помогают? Использование агониста в суставе обычно помогает нам растянуть антагониста, поэтому небольшая помощь Бэтмена и Робина может иметь большое значение, чтобы помочь углубить ваши позы йоги и лучше понять их.
Перепечатано с разрешения доктора Нолана Ли, Balancedflow.today
Д-р Нолан Ли — преподаватель йоги и специалист по физической реабилитации из Чикаго, штат Иллинойс, с необычайной страстью к пониманию того, как движется и функционирует тело.Нолан обладает уникальной способностью сочетать науку анатомии с искусством йоги. Имея активную практику в этой клинике Balanced Flow Wellness, он практически применяет йогу для восстановления и поддержания здоровья. Доктор Ли также имеет степень магистра акупунктуры и является сертифицированным специалистом по корректирующим упражнениям NASM (CES). Он с энтузиазмом делится своими знаниями по йоге и анатомии на лекциях, семинарах и в своем блоге.
границ | О происхождении мышечной синергии: инвариантный баланс при совместной активации пар мышц агонистов и антагонистов
Введение
Произвольное движение требует сенсомоторной трансформации между внешней и внутренней системой отсчета (Kandel et al., 2012). Для выполнения движения с определенными конечными характеристиками, включая аспекты кинематики, силы и импеданса, сенсомоторное преобразование может напрямую отображать мышечное пространство в пространство задачи; Центральная нервная система (ЦНС) должна регулировать мышечную активность, чтобы соответствовать кинематическим и кинетическим характеристикам конечной точки. Если мышечное пространство напрямую связано с пространством задачи, движение конечной точки можно спланировать или спрогнозировать на основе системы отсчета в мышечном пространстве, в которой кодируются двигательные команды от ЦНС к мышцам.Система отсчета в мышечном пространстве обеспечивает основу для объяснения того, как люди планируют, регулируют и достигают желаемого движения конечной точки при управлении несколькими мышцами выполняющей конечности.
Однако нервно-мышечно-скелетная система неврологически и механически избыточна. Обратная задача (т. Е. Планирование движения) включает в себя бесконечное количество возможных решений данной задачи. Одна из гипотез для решения этой некорректно поставленной проблемы состоит в использовании стереотипных паттернов координации или мышечной синергии.Синергия — это классы моделей движения, которые представляют собой функциональные группы структурных элементов в регуляции и контроле движения (Bernstein, 1967). Гипотеза синергии подчеркивает, что ЦНС использует функциональную структуру на разных моторных уровнях (нейроны, мышцы и суставы) для упрощения моторного контроля. Существует множество доказательств того, что естественное решение проблемы распределения приводит к очень устойчивой кинематике конечной точки (Morasso, 1981; Lacquaniti et al., 1983; Flash and Hogan, 1985; Shadmehr and Mussa-Ivaldi, 1994) и кинетике (Hogan , 1985; Mussa-Ivaldi et al., 1985; Флэш и Мусса-Ивальди, 1990; Tsuji et al., 1995), называемые инвариантными характеристиками (Зациорский, Прилуцкий, 2012). Двигательная инвариантность может дать ключ к пониманию механизма, лежащего в основе произвольных движений, потому что ЦНС может налагать или использовать эти ограничения для решения проблемы степеней свободы (Bernstein, 1967), необходимой для двигательного контроля.
Однако это открытый вопрос: является ли синергия мышц фундаментальными примитивами или следствием других примитивов? Некоторые исследователи считают моторную синергию строительными блоками движения (d’Avella et al., 2006; Латаш, 2008; Cheung et al., 2009; Dominici et al., 2011; Биззи и Чунг, 2013). Однако другие исследователи считают, что по крайней мере некоторые типы моторной синергии — это не примитивы, а совокупность механического сопротивления (Hogan and Sternad, 2012).
Хотя многие аспекты моторного контроля и координации остаются спорными, например, система отсчета движений, моторная избыточность и моторные примитивы (неврологическое или механическое происхождение моторной синергии), наша цель в этой статье — предоставить некоторые доказательства, подтверждающие концепцию, что мышечно-механический Импеданс может дать ключ к пониманию того, как распутать взаимосвязанные взаимосвязи между моторным управлением.
В нашей предыдущей работе мы пересмотрели синергию мышц с точки зрения машиностроения и связали их с системой отсчета в мышечном пространстве (Uno et al., 2014). Математическая формулировка была теоретически привлекательной, поскольку предполагала, что мышечная синергия была функцией коактивации пар мышц агонист-антагонист (АА) (то есть композитов механического сопротивления). Более того, мышечные синергии рассматривались как инвариантные функциональные модули, представляющие систему отсчета в полярных координатах с центром в конкретном суставе (например,г., плечо) у основания туловища. Таким образом, мы выдвинули гипотезу о том, что синергия мышц является следствием баланса механического сопротивления, который представляет собой систему отсчета в мышечном пространстве.
В этой работе мы исследуем нашу гипотезу с точки зрения управления моторикой, обучения и восстановления. Если мышечная синергия является примитивом для моторного контроля, обучения и восстановления, можно ожидать, что общая синергия будет извлечена из множества разных задач, разных предметов и различных моторных навыков испытуемых.Кроме того, исследование мышечной синергии у субъекта с нейромоторным дефицитом дало бы представление о степени инвариантности мышечной синергии, поскольку фундаментальные двигательные функции могут быть нарушены аномальным мышечным тонусом, что является обычным признаком после неврологической травмы. В этом исследовании мы проверили две экспериментальные парадигмы: (1) мышечная синергия на моторную адаптацию и (2) мышечная синергия на двигательное восстановление. На наш взгляд, синергия мышц сильно связана с механическим сопротивлением. Мы также обсуждаем конечную жесткость и сопутствующие виртуальные траектории в контексте мышечной синергии.
Методы
Аппарат
Множественные мышцы нервно-мышечной системы человека отвечают за координацию и регулировку движений при переговорах в динамической среде. Создание систематической основы для объяснения моторной синергии, механического сопротивления и виртуальных траекторий является проблемой для всестороннего понимания моторного контроля и обучения. Предполагая, что исследование множественной мышечной активности приведет к более глубокому пониманию нейронного механизма, лежащего в основе произвольных движений, мы разработали устройство кинезиологического анализа, которое позволяет нам оценивать эти внутренние моторные характеристики по сигналам электромиографии (ЭМГ) во время движения.На рис. 1 представлен обзор системы, которую мы называем «анализатор синергии » . Система состоит из дисплея, стола с экраном, стула с ремнями безопасности, тележки с опорой для рук с шариковыми колесами с низким коэффициентом трения, системы захвата движения и системы измерения ЭМГ.
Рисунок 1. Экспериментальная установка. (A) Дисплей ; (В) экранный стол; (C) ЭМГ-сигналы; (D) мышечная синергия [ u R ( s ) (вверху слева), u φ ( s ) (вверху справа) и u φ × R ( s ) (внизу слева)]; (E) эллипс конечной жесткости; (F) точка равновесия.Испытуемый выполнил обведение по спирали или кругу недоминантной / доминирующей рукой в горизонтальной плоскости, наблюдая за дисплеем, показывающим идеальную траекторию. ЭМГ-активность во время движений регистрировалась для анализа мышечной синергии, жесткости конечных точек и виртуальных траекторий.
Испытуемые сидели в кресле, зафиксировав оба плеча ремнями безопасности, и выполняли произвольные движения руками, глядя на 65-дюймовый дисплей [или экранный стол размером 1,20 м × 0,86 м (ширина × высота)] перед ними.Верхняя конечность была помещена на опору для рук на уровне плеч, чтобы исключить влияние силы тяжести и ограничить движение руки в горизонтальной плоскости. Для концептуализации верхней конечности как структуры двузвенных, лучезапястный сустав был прикреплен к рычажным опорной тележке. Во время произвольных движений руки субъекта кинематика и сигналы ЭМГ записывались синхронно. Положение каждого сустава (левое плечо, правое плечо, левый или правый локоть, левая или правая рука) верхних конечностей измерялось с помощью оптической системы захвата движения с восемью камерами (OptiTrack; NaturalPoint, Inc., Корваллис, штат Орегон, США) при 100 Гц.
Электромиографические сигналы шести мышц верхних конечностей [задняя дельтовидная, передняя дельтовидная мышца, трехглавая мышца плеча (длинная голова), двуглавая мышца плеча, трехглавая мышца плеча (боковая головка) и плечевой сустав] измерялись с помощью многотелеметрической системы (WEB-5000; Nihon Kohden Corp., Япония) на частоте 1000 Гц. Поверхностные электроды прикрепляли к соответствующим местам на измеряемых мышцах, как описано ранее (Criswell, 2010; Perotto, 2011), после очистки кожи спиртом (<10 кОм).Полученные ЭМГ-сигналы анализировали после следующих процедур: полосовая фильтрация (10–450 Гц), двухполупериодное выпрямление, сглаживание и нормализация до максимального произвольного сокращения (MVC), которое выражалось в процентах от MVC. Мы следовали стандартной процедуре для определения MVC для каждой мышцы (Hislop and Montgomery, 2007). Затем анализатор синергии оценил синергию мышц, жесткость конечных точек и виртуальные траектории на основе измеренных данных движения, одновременно накладывая эти моторные показатели в реальном времени (частота обновления, 10 Гц) на фактические изображения, снятые с камеры вида сверху.Результаты оценки предоставлялись испытуемому на дисплее (или экранной таблице) для использования во время тренировки с биологической обратной связью.
Экспериментальная парадигма
В этом исследовании основное внимание уделялось роли синергии мышц, жесткости конечных точек и виртуальных траекторий во время произвольной тренировки и реабилитации. Чтобы выяснить эволюцию этих моторных характеристик, мы провели два эксперимента.
Эксперимент 1: Моторная адаптация после тренировки
Восемь молодых людей (все мужчины, 23 ± 1 года, правши) вызвались принять участие в первом эксперименте.Ни один из субъектов не сообщил о нервно-мышечных заболеваниях в анамнезе. Эксперимент был одобрен Наблюдательным советом Института Осаки, и все субъекты предоставили письменное информированное согласие перед участием.
Каждый испытуемый выполнял спиральную трассировку как можно быстрее, не касаясь линий своей недоминантной (левой) рукой в горизонтальной плоскости (рис. 1). Максимальный радиус спирали 21 см. Визуальное представление идеальной траектории и текущего положения руки было предоставлено на дисплее перед испытуемым; идеальная спиральная траектория имела шаг 1.0 см между строками на дисплее, что эквивалентно 3,5 см в области задания. Центр спирали в пространстве для задач был отрегулирован в соответствии с положением рук каждого испытуемого в естественной позе. Движение включало 5,75 оборота по часовой стрелке снаружи внутрь. Чтобы ознакомиться с процедурой, испытуемые выполнили 20 испытаний в качестве практики перед первым измерением исходного уровня. Затем испытуемого попросили выполнять задание 50 раз в день в течение 8 дней. В первый и последний дни были измерены кинематика и сигналы ЭМГ во время выполнения задания для анализа синергии мышц, жесткости конечных точек и виртуальных траекторий.
Эксперимент 2: Восстановление моторики после реабилитации
Два пожилых пациента, здоровый субъект (мужчина, 61 год, правша) и субъект, перенесший инсульт (мужчина, 74 года, правша), вызвались участвовать во втором эксперименте. Эксперимент был одобрен наблюдательными советами Университета Осаки и больницы Сэнри Тюо, и оба субъекта дали информированное согласие. Здоровый субъект был контрольным субъектом того же поколения, что и другой субъект.Пациент, перенесший инсульт, находился в стационаре в острой стадии с правой или умеренной гемиплегией с правой стороны, но был в состоянии поддерживать вербальное общение. Пациент, перенесший инсульт, провел эксперимент дважды: до и через 2,5 месяца после реабилитации.
Каждый испытуемый выполнял обводку круга своей доминирующей (правой) рукой в горизонтальной плоскости. Поскольку перед реабилитацией для пациента, перенесшего инсульт, было сложно выполнить задачу по трассировке спирали, мы выбрали аналогичную траекторию в меньшем круге (радиус: 10 см), чтобы ему было легче выполнить эту задачу.Субъект после инсульта выполнял задание своей пораженной рукой как можно быстрее без какой-либо помощи, в то время как здоровый субъект выполнял задание с низкой скоростью (время движения: около 4 секунд), чтобы его движения соответствовали движениям после удара. предмет инсульта. Кинематика и сигналы ЭМГ во время выполнения задачи были измерены для анализа синергии мышц, жесткости конечных точек и виртуальных траекторий.
Анализ данных
Коэффициент AA и сумма AA
Плечо человека было смоделировано как двухзвенная структура с шестью мышцами (рис. 2).Мы выбрали четыре моносуставных мышцы и две двухсуставные мышцы, соответствующие движениям плеча и локтя в горизонтальной плоскости. Выбранные мышцы были проиндексированы следующим образом: задняя дельтовидная ( M s, ext ), передняя дельтовидная ( M s, flex ), трицепс плеча (длинная голова) ( M se, ext ). , двуглавая мышца плеча ( M se, flex ), трицепс плеча (боковая головка) ( M e, ext ) и brachioradialis ( M e, flex ).Эти шесть мышц составляют три пары мышц AA. Пара моно-суставных мышц вокруг плечевого сустава ( M s, ext и M s, flex ), пара двухсуставных мышц вокруг плечевого и локтевого суставов ( M se, ext и M se, flex ) и пара моно-суставных мышц вокруг локтевого сустава ( M e, ext и M e, flex ) являются основными функциональными единицами для координации и регулирования движения плечевого и локтевого суставов для контроля движения рук; каждая пара мышц состоит из двух мышц, у которых есть противоположные (т.е., агонист и антагонист) функции.
Рис. 2. Модель верхней конечности человека . Скелетно-мышечная структура верхней конечности человека упрощена как двухзвенная модель с шестью мышцами. (A) Три пары мышц-агонистов-антагонистов расположены вокруг плечевого и локтевого суставов. Парные мышцы обозначены одним цветом (красным, зеленым и синим). Пара моноартикулярных мышц вокруг плечевого сустава ( M s, ext и M s, flex ), пара двухсуставных мышц вокруг плечевого и локтевого суставов ( M se, ext и M se, flex ), и пара моно-суставных мышц вокруг локтевого сустава ( M e, ext и M e, flex ) отвечают за координацию и регулировку плеча и локтя. совместные движения для управления движением рук. (B) Положение руки в плоском пространстве задачи может быть определено в декартовых координатах ( x , y ) или полярных координатах ( R , φ) с центром на плече. Обратите внимание, что полярные координаты ( R , φ) определяются как положительные, когда конечная точка перемещается от основания тела. Эти координаты являются функциями углов плечевого и локтевого суставов (θ s , θ e ).
Чтобы охарактеризовать моторные функции пары мышц AA вокруг сустава (суставов), j , мы определили следующие мета-параметры (соотношение AA, r j и сумма AA, s j ) в качестве управляющих переменных:
rj = mj, extmj, ext + mj, гибкий, (j = s, se, e) (1a) sj = mj, ext + mj, flex, (j = s, se, e) (1b), где индекс j обозначает сустав (суставы) и соответствует любому из плечевого (-ых), плечевого и локтевого (se) и локтевого (e) суставов; m j, ext и m j, flex — это ЭМГ-активности мышц-разгибателей и сгибателей вокруг сустава (суставов) j .В таблице 1 перечислены моторные функции этих пар мышц AA. Соотношение AA вносит вклад в положение равновесия суставного угла (ов), а сумма AA вносит вклад в механический импеданс сустава (ов). Детали математической теории концепции АА были опубликованы ранее (Ariga et al., 2012; Pham et al., 2014; Hirai et al., 2015).
Таблица 1. Определения и функции соотношения агонист-антагонист (AA) (r) и суммы (s) AA .
Мышечная синергия
Одной из гипотез пространственного и временного контроля движений конечностей с помощью нескольких мышц является использование иерархической координации. В предыдущем разделе мы рассматривали координацию мышц-агонистов и антагонистов как самый низкий уровень координации. В этом разделе объясняется следующий уровень координации, внутриконечная координация, и развивается концепция AA в рамках модели, показанной на рисунке 2. Чтобы вывести взаимосвязь между точками равновесия, отношениями AA и суммами AA, мы использовали следующие предположения: ( 1) каждую мышцу можно описать как пружинную систему, коэффициент упругости и естественная длина которой регулируются в соответствии с сигналом ЭМГ; (2) плечо момента каждого шарнира одинаковое и постоянное; и (3) длины плеча (от плечевого сустава до локтевого сустава) и предплечья (от локтя до центра запястья) равны.В математическом смысле предположение (1) означает, что сократительная сила мышцы F ( м ) может быть выражена как
F (м) = К (м) (l — l0 (м)) (2), где K ( м ) — жесткость мышц на уровне активности ЭМГ м , а l и l 0 ( м ) — длина мышцы и естественная длина мышцы при ЭМГ. уровень активности м . K ( м ) и л 0 ( м ) —
и
, где C 1 , C 2 , C 3 и C 4 — постоянные коэффициенты, которые представляют свойства мышцы.Детали нашего предположения с математической формулировкой были опубликованы ранее (Ariga et al., 2012; Hirai et al., 2015). Основываясь на этих предположениях, можно описать смещение углов равновесного сочленения на плече и локте, θ EP = (θ s, EP , θ e, EP ) T . с помощью следующего уравнения, используя отношения AA и суммы AA (Pham et al., 2014; Uno et al., 2014; Hirai et al., 2015):
(Θs, EPθe, ЕР) = С (sssse + sssesssse + Sesse + sssesessesssse + Sesse + sssesessesssse + Sesse + sssessssesssse + Sesse + sssessssesssse + Sesse + sssesesse + sssesssse + Sesse + SSSE) × (RS-12rse- 12re − 12) θEP = C (qsT (s) qeT (s)) (r − 12) (5), где C — коэффициент, определяемый характеристиками мышцы и моментом плеча, r — вектор отношения AA ( r s , r se , r e ) T , s — вектор суммы AA ( s s , s se , s e ) T и q s s s ) и q e ( s ) определяются следующим образом:
qs (s) = 1sssse + sesse + ssse (sssse + ssse, sesse, −sesse) T (6a) qe (s) = 1sssse + sesse + ssse (-sssse, sssse, sesse + ssse) T (6b)Обратите внимание, что q s ( s ) и q e ( s ) состоят только из суммы AA.Как показано в уравнении (5), соотношение AA линейно управляет углом равновесного сочленения, если q s ( s ) и q e ( s ) удовлетворяют условию постоянства. Однако одной проблемой является резервирование двигателя: размер пространства передаточного отношения AA всегда превышает размер суставного пространства. Гипотеза синергии подчеркивает использование координации в решении этой некорректно поставленной проблемы (Bernstein, 1967).Мы использовали эту гипотезу, чтобы ввести метод для извлечения мышечной синергии от костно-мышечной модели человека. Суть этой техники состоит в том, что ВП в конечной точке описывается на основе системы полярных координат с центром на плече (рис. 2). Кинематика руки с двумя степенями свободы с углом плеча θ s и углом изгиба θ e определяет уникальное положение конечной точки, p = ( R , φ) T , в полярных координатах:
p = (Rϕ) = (2Lcos | θe | 2π− (θs + θe2)) (7), где L — длина плеча и предплечья.Принимая во внимание небольшое отклонение p и подставляя уравнение. (5) в уравнение. (7), мы можем получить отношения между конечной точкой EP, отношениями AA и суммами AA:
ΔpEP = JRϕ (θ) ⋅ΔθEP = (CR (θe) 00Cϕ) (qeT (s) (qs (s) + qe (s) 2) T) (ΔrsΔrseΔre) ≈ (CR00Cϕ) (qeT (s) (qs ( s) + qe (s) 2) T) (ΔrsΔrseΔre) (8), где JRϕ (θ) (= ∂ (R, ϕ) T∂ (θs, θe)) — матрица Якоби, которая связывает пространство суставов с пространством задач, описанным в полярных координатах; C R (θ e ) и C φ — это коэффициенты, определяемые характеристиками мышц, моментным плечом каждого сустава и длиной плеча / предплечья L .Более того, CR (θe) (= CϕLsin | θe | 2) может быть аппроксимировано как постоянная CR (= CR (θ¯e)), когда локоть достаточно согнут во время движения, где θ¯e — средний угол локтевой сустав. Замечательной особенностью нашего метода является то, что формулировка основана на полярных координатах. Благодаря хорошей линейной аппроксимации между пространством задач, описанным в полярных координатах, и пространством суставов (Mitsuda et al., 1997), указанное выше уравнение удовлетворяется в относительно широком диапазоне рабочего пространства. Уравнение (8) указывает, что смещение конечной точки EP в полярных координатах может быть оценено путем проецирования трехмерного вектора отношения AA Δ r [= (Δ r s , Δ r se , Δ r e ) T ] на двумерное подпространство, состоящее из C R q e ( s ) и Cϕ (qs (s) + qe (s) 2).Основываясь на этой информативной взаимосвязи, мы определили векторы синергии мышц как
. uR (s) = qe (s) | qe (s) | (9а) uϕ (s) = qs (s) + qe (s) 2 | qs (s) + qe (s) 2 | (9b) uR × ϕ (s) = uR (s) × uϕ (s) | uR (s) × uϕ (s) | (9c), где u R ( s ) и u φ ( s ) указывают единичные векторы для распределений вектора отношения AA в радиальном и тангенциальном направлениях. направлений, а u R × φ ( s ) определяется как единичный вектор в нулевом направлении (т.е.е., нулевое пространство). Синергия мышц в нулевом направлении не рассматривается как непосредственный вклад в движение конечной точки EP, но считается регулирующей жесткость конечной точки (Uno et al., 2014). Эти векторы синергии являются основой для движения конечной точки EP в радиальном, тангенциальном и нулевом направлениях. Обратите внимание, что синергия мышц зависит только от суммы AA. В нашем определении мышечная синергия представляет собой баланс механического сопротивления за счет совместной активации мышц AA и играет роль системы отсчета в мышечном пространстве для конечного движения EP.Стоит отметить, что синергия мышц становится постоянной, если q s ( s ) и q e ( s ) удовлетворяют условию постоянства. Это предположение нетривиально, но справедливость этого предположения (т.е. инвариантность мышечной синергии) подтверждается в следующих разделах.
Конечная жесткость
Конечная жесткость — это еще один показатель механического сопротивления, в то время как синергия мышц указывает на баланс механического сопротивления за счет совместной активации мышц AA.Предполагая линейную зависимость между активацией отдельной мышцы и соответствующей жесткостью мышц, жесткость сустава K j ( s ) в статическом состоянии может быть выражена как следующая функция от сумм AA:
Kj (s) = kj (ss + ssessessese + sse) (10), где k j Н · м / рад — константа усиления для преобразования сумм AA в жесткость соединения. В динамических условиях, таких как наличие силовой нагрузки, требуется дополнительный член, зависящий от положения руки и силы руки (McIntyre et al., 1996). Однако мы проигнорировали этот эффект для простоты, предполагая, что сила руки была минимальной для нашей задачи. Тогда конечная жесткость K e ( s , θ ) может быть получена следующим образом:
Ke (s, θ) = (JxyT (θ)) — 1⋅Kj (s) ⋅Jxy − 1 (θ) (11), где Jxy (θ) (= ∂ (x, y) T∂ (θs, θe)) — матрица Якоби, которая связывает совместное пространство с пространством задач в декартовых координатах. Матрица жесткости в конечной точке может быть графически представлена в виде эллипса жесткости, вычисленного на основе собственных значений и собственных векторов матрицы (Hogan, 1985; Mussa-Ivaldi et al., 1985; Флэш и Мусса-Ивальди, 1990).
Виртуальные траектории
Путем проецирования вектора отклонения отношения AA на векторы мышечной синергии, мы можем получить изменение EP в конечной точке. Мы определили отклонение коэффициентов активации синергии (Δ w R , Δ w φ и Δ w R × φ ) как внутренние продукты векторов мышечной синергии [ u R ( s ), u φ ( s ) и u R × φ ( s )] и вектор отклонения отношения AA Δr (= r − r¯), где r¯ — отношение AA в базисной позиции.
ΔwR = uRT (s) ⋅Δr = uRT (s) ⋅ (r − r¯) (12a) Δwϕ = uϕT (s) ⋅Δr = uϕT (s) ⋅ (r − r¯) (12б) ΔwR × ϕ = uR × ϕT (s) ⋅Δr = uR × ϕT (s) ⋅ (r − r¯) (12c)Отклонение конечной точки EP выражается как
(ΔREPΔϕEP) = (αRΔwRαϕΔwϕ) (13), где α R и α φ — константы усиления для настройки масштаба коэффициентов активации мышечной синергии в соответствии с масштабом виртуальной траектории, а α R и α φ соответствуют C R и C φ в уравнении.(8). Смещение конечной точки EP в полярных координатах, p EP = ( R EP , φ EP ) T , может быть вычислено из линейной комбинации коэффициентов активации мышечной синергии. как
pEP = (REPϕEP) = (R¯EP + ΔREPϕ¯EP + ΔϕEP) = (R¯EP + αRΔwRϕ¯EP + αϕΔwϕ) (14)где R¯EP и ϕ¯EP — полярные координаты конечной точки EP в базовой позиции. В состоянии покоя в базовой позиции мы предположили, что фактическая позиция и позиция EP в конечной точке стали равными.Наконец, конечная точка EP в декартовых координатах может быть получена следующим преобразованием:
(xEPyEP) = (REPcosϕEPREPsinϕEP) (15)Виртуальная траектория — это временной ряд, представляющий собой последовательность EP в конечной точке. EP может быть представлен как точка в пространстве конфигурации мышечной синергии, а виртуальная траектория может быть идентифицирована путем отслеживания точки во времени в пространстве мышечной синергии. Контрольный контроль, основанный на EP или виртуальных траекториях, то есть гипотеза EP (Feldman, 1966, 1986; Feldman et al., 1990; Feldman and Latash, 2005), была влиятельной гипотезой в отношении моторного контроля. Наша формулировка может дать представление об объединении различных идей мышечной синергии, жесткости конечных точек и виртуальных траекторий.
Результаты
Эксперимент 1: синергетический анализ моторной адаптации
Спиральный тест — надежный измеритель точности и скорости движений верхних конечностей; он обычно используется в реабилитации в качестве качественной оценки для обеспечения обратной связи с пациентами с нарушениями координации, такими как мозжечковая атаксия или болезнь Паркинсона (Verkerk et al., 1990). Мы приняли этот показатель в качестве индекса, чтобы отразить эволюцию движений недоминантной руки посредством произвольной тренировки, хотя испытуемые были неврологически и физически неповрежденными. Испытуемым оценивали время, затраченное на выполнение задания, с добавлением штрафного времени за касание или пересечение линий; оценка определялась как сумма времени, затраченного (от начала до гола), количества касаний спиральной линии, умноженного на 3, и количества раз, когда спиральная линия пересекалась, умноженного на 5.Оценка кинематики значительно улучшилась для восьми испытуемых за 8 дней обучения. Средний балл для всех субъектов составил 62,1 ± 23,3 (среднее ± стандартное отклонение) в первый день и 23,3 ± 11,8 в последний день, соответственно, что указывает на улучшение двигательной активности.
На рисунке 3 показано типичное соотношение AA и сумма AA до и после обучения для одного предмета (предмет №1). Коэффициент AA — это независимая переменная в диапазоне от 0 до 1, а сумма AA — это независимая переменная в диапазоне от 0 до 2.Соотношение AA и сумма AA показывают степень увеличения углов равновесного сочленения и увеличения жесткости сочленения, соответственно. Обратите внимание, что обе переменные меняются со временем, потому что они рассчитываются на основе сигналов ЭМГ во время движения.
Рис. 3. Типичное изменение соотношения агонист-антагонист (AA) и суммы AA с первого и последнего дней добровольной тренировки (Субъект № 1) . Красная, зеленая и синяя линии указывают на изменение зависимой от времени объясняющей переменной для мышц AA вокруг плечевого, плечевого, локтевого и локтевого суставов соответственно.Соотношение AA и сумма AA менялись во времени в соответствии с ритмическими движениями конечностей. Изменения в соотношении AA и сумме AA показывают, что произвольная тренировка привела к изменению контроля EP и жесткости вокруг каждого сустава.
На рисунке 4 показано изменение синергии мышц для восьми испытуемых до и после тренировки с использованием метода, описанного в предыдущем разделе. На каждом графике левая, центральная и правая группы набора из трех столбцов (красный, зеленый и синий) иллюстрируют синергию мышц в радиальном направлении [ u R ( s ) ], тангенциального направления [ u φ ( s )] и нулевого направления [ u R × φ ( s )] соответственно.Три цветные полосы в каждой мышечной синергии представляют значения элементов вектора мышечной синергии, и каждое значение количественно определяет вклад мышечной активности АА в движение плеча, плеча и локтя и локтевого сустава соответственно. Сводку средних изменений и SD мышечной синергии см. В Таблице 2. Таблица 3 иллюстрирует значения внутреннего продукта (IP) между векторами мышечной синергии, вычисленные на основе сигналов ЭМГ в Эксперименте 1, что указывает на сходство мышечной синергии в обоих интервалах -индивидуальные и внутрииндивидуальные вариации.
Рис. 4. Мышечная синергия от первого и последнего дней произвольной тренировки для восьми субъектов . Наборы из трех стержней представляют синергию мышц в радиальном направлении ( u R ), тангенциальном направлении ( u φ ) и нулевом направлении ( u R × φ ). Каждая цветная полоса в мышечной синергии указывает вклад мышечной активности агониста-антагониста в движение плеча (красный), плеча и локтя (зеленый) и локтевого сустава (синий).Мышечная синергия демонстрировала аналогичные паттерны как внутри-, так и межиндивидуальных вариаций во время тренировки, демонстрируя существование общих и инвариантных систем отсчета для моторного представления, которые не зависят от уровня моторного обучения.
Таблица 2. Значения элементов мышечной синергии до и после произвольной тренировки по спиральной траектории (A) первый день тренировки и (B) последний день тренировки .
Таблица 3.Значения внутреннего продукта между мышечным синергизмом (эксперимент 1) .
На рис. 5 показана типичная конечная точка жесткости до и после произвольной тренировки (первый и последний дни обучения) для Субъекта № 1. Эллипсы конечной жесткости во время движения сравнивались между соответствующими положениями рук. На рисунке 6 показаны типичные фактические и виртуальные траектории до и после добровольного обучения для Субъекта №1. Красный и зеленый круги — это начальная и конечная точки, а стрелка указывает направление, в котором движется каждая траектория.На рис. 7 показаны фактические и виртуальные траектории в радиальном и тангенциальном направлениях, которые соответствуют траекториям на рис. 6. На рис. 7 также показано изменение времени движения, что указывает на значительное улучшение характеристик двигателя. Наблюдаемые характеристики эволюции на этих рисунках являются репрезентативными для всех восьми субъектов.
Рис. 5. Типичное изменение жесткости конечной точки с первого и последнего дней добровольного обучения (Тема № 1) .Хотя его размер изменился, форма и ориентация эллипса конечной жесткости не сильно изменились во время тренировки. Ориентация большой оси эллипса имела тенденцию к наклону в направлении, соединяющем плечо и конечную точку (то есть радиальное направление). Это указывает на то, что жесткость конечной точки в тангенциальном направлении имеет тенденцию быть намного меньше, чем в радиальном направлении.
Рис. 6. Типичное изменение виртуальной траектории с первого и последнего дней добровольного обучения (Тема № 1) .Изменение виртуальных траекторий (синий цвет) было экстремальным по сравнению с изменением реальных траекторий (черный цвет). Виртуальные траектории были организованы из неупорядоченных паттернов в хорошо отрегулированные, но слегка искаженные спиральные паттерны, которые вращались в направлении, противоположном фактической траектории. Оценка спирального теста соответственно снизилась с 51,7 ± 20,7 до 20,9 ± 10,6, что указывает на улучшение моторных характеристик с точки зрения скорости и точности.
Рисунок 7.Эволюция реальных и виртуальных траекторий в радиальном и тангенциальном направлениях (Тема №1) . Виртуальная траектория во время быстрой спирали для Субъекта № 1 улучшилась благодаря добровольному обучению. В частности, эволюция виртуальной траектории в тангенциальном направлении была экстремальной, и она превратилась в ритмичное движение, которое предшествовало реальной траектории, колеблющейся почти в противофазе; виртуальная траектория в радиальном направлении превратилась в траекторию, которая предшествовала реальной траектории, колеблющейся почти синфазно.Частоты колебаний виртуальной траектории в обоих направлениях стали короче, чем у реальной траектории. Эти эволюционные характеристики виртуальной траектории типичны для всех восьми субъектов.
Эксперимент 2: синергетический анализ восстановления моторики
Показатель функциональной независимости (FIM) — это широко используемая шкала тяжести инвалидности, которая количественно определяет влияние нарушения на выполнение повседневной деятельности (Granger et al., 1986; Карр и Шеперд, 2010). Оценка FIM (максимальный балл: 126) пациента, перенесшего инсульт, в этом исследовании составляла 44 балла до реабилитации и 67 баллов после 2,5 месяцев реабилитации. Эти оценки показывают, что двигательная функция субъекта улучшилась благодаря упражнениям терапевта в процессе реабилитации. В соответствии с изменением оценки FIM, среднее время движения для пациента после инсульта в нашей задаче улучшилось с примерно 6 до примерно 4 с до и после реабилитации; среднее время движения здорового испытуемого составляло около 4 с.
Поскольку у пациента, перенесшего инсульт, наблюдалось очевидное выздоровление, мы затем сравнили моторные показатели мышечной синергии, жесткости конечных точек и виртуальных траекторий, которые характеризуют координацию и регуляцию множественной мышечной активности до и после реабилитации. На рис. 8 показаны изменения соотношений AA и сумм AA для субъекта, перенесшего инсульт, до и после 2,5 месяцев реабилитации, а также изменения соотношений AA и сумм AA для здорового субъекта того же поколения.На рисунке 9 показаны изменения синергии мышц, жесткости конечных точек и виртуальных траекторий, которые можно оценить с помощью предложенного алгоритма с соотношением AA и суммой AA. Фактическая траектория также была нанесена на график виртуальной траектории на Рисунке 9 как один из показателей восстановления моторики, хотя значительных изменений не наблюдалось. Подробности средних изменений и SD мышечной синергии приведены в таблице 4. В таблице 5 сравниваются значения IP между мышечными векторами синергии для различных вариаций в эксперименте 2: межиндивидуальные вариации, внутрииндивидуальные вариации и вариации внутри задачи.
Рис. 8. Изменение соотношения агонист-антагонист (АК) и суммы АК для пациента, перенесшего инсульт, до и после 2,5 месяцев реабилитации . Красная, зеленая и синяя линии указывают на изменение зависимой от времени объясняющей переменной для мышц AA вокруг плечевого, плечевого, локтевого и локтевого суставов соответственно. Каждый набор данных был нормализован по периоду времени движения. Изменения в соотношении AA и сумме AA показывают, что реабилитация привела к изменению контроля EP и жесткости вокруг каждого сустава.В частности, сумма AA улучшилась, хотя она все еще была далека от уровня, наблюдаемого у здорового человека. (Обратите внимание на разный диапазон графиков сумм AA до и после реабилитации.)
Рис. 9. Изменение синергизма мышц, жесткости конечных точек и виртуальных траекторий до и после 2,5 месяцев реабилитации . Верхний, средний и нижний блоки предназначены для пациента, перенесшего инсульт, до реабилитации, после 2.5 месяцев реабилитации, и для здорового человека из того же поколения соответственно. Наборы из трех стержней представляют синергию мышц в радиальном направлении ( u R ), тангенциальном направлении ( u φ ) и нулевом направлении ( u R × φ ). Каждое число на эллипсах жесткости указывает прогресс движения во времени и соответствует каждому количеству точек на фактических и виртуальных траекториях.
Таблица 4. Значения элементов мышечной синергии для пациента, перенесшего инсульт, до и после реабилитации, а также для здорового пожилого пациента .
Таблица 5. Значения внутреннего продукта между мышечным синергизмом (эксперимент 2) .
Обсуждение
Мышечная синергия как система отсчета в мышечном пространстве
Сосредоточившись на координации действий мышц АА, здесь мы обсуждаем взаимосвязь между синергетическими эффектами мышц, жесткостью конечных точек и виртуальными траекториями.Насколько нам известно, мышечная синергия — это индекс координации, определяемый как функция совместной активации мышц AA. Это составная единица, связанная с механическим сопротивлением, а также функциональный модуль, представляющий опорную ось в полярной системе координат для смещения EP в пространстве задач. Короче говоря, мышечная синергия представляет собой систему отсчета в мышечном пространстве, которую можно использовать в моторном планировании для контроля конечных точек. Конечная жесткость — еще один показатель механического сопротивления; баланс коактивации мышц AA определяет не только синергию мышц, но также форму и ориентацию эллипса конечной жесткости.Виртуальная траектория — это временная последовательность EP в конечной точке. EP может быть представлен как точка в пространстве конфигурации мышечной синергии, а виртуальная траектория может быть идентифицирована путем отслеживания точки во времени в пространстве мышечной синергии. Математические соотношения между этими двигателями между обмотками были получены на основе физического моделирования скелетно-мышечной структуры с несколькими мышцами АА.
Физический подход к экстракции мышечной синергии
Наш подход может открыть новую перспективу в понимании моторного контроля и обучения.Двигательные синергии обычно извлекаются путем применения статистических методов к объясняющим переменным, таким как углы суставов и сигналы ЭМГ, которые могут быть набором двигательных состояний, возникающих в результате команд ЦНС, основанных на меньшем количестве двигательных модулей. Однако результаты факторной декомпозиции не обязательно можно интерпретировать с помощью таких объясняющих переменных, даже если факторы успешно уменьшают размерность движения. Следовательно, физический смысл моторной синергии в большинстве случаев не ясен, в частности, в случае мышечной синергии, потому что ЭМГ включает информацию как о кинематическом, так и о кинетическом аспектах; мышцы работают как на смещение суставов, так и на сопротивление суставов.ЭМГ феноменологически интерпретируется как электрический сигнал, возникающий в результате деполяризации мышечных волокон. Однако взаимосвязь между активацией мышц и движением до конца не изучена. Мы предположили, что ЦНС контролирует состояние равновесия и механический импеданс для многосуставных движений, изменяя определенные нейрофизиологические параметры (Feldman et al., 1990), и что ЭМГ, следовательно, отражает, по крайней мере, эти две части информации. Затем статистический анализ исходных сигналов ЭМГ может привести к выявлению временных факторов, которые обычно зависят от задачи и / или объекта.
Чтобы понять физический смысл мышечной синергии, в этом исследовании изучалась концепция AA с использованием следующих объясняющих переменных: соотношение AA, которое связано с углом равновесного сустава, и сумма AA, которая связана с жесткостью сустава. . Поскольку концепция АА происходит от управления роботизированной системой с антагонистическими пневматическими искусственными мышцами, синергия мышц, извлеченная в рамках концепции АА, имеет ясный физический смысл. Подобные идеи по контролю за мышцами АА можно найти в области нейробиологии [e.g., соотношение напряжений AA-мышц (Lestienne et al., 1981; Bizzi et al., 1984), механическое сопротивление и коактивация AA-мышц (Hogan, 1984), а также контроль EP и уровня совместного сокращения для движения суставов (Feldman et al., 1990)]. Однако наша концепция АА сильно отличается от них. Концепцию АА можно рассматривать как еще одну форму гипотезы EP (Feldman, 1966, 1986; Feldman et al., 1990; Feldman and Latash, 2005), и ее можно распространить на новую концепцию синергии на основе EP (Pham et al. ., 2014; Uno et al., 2014; Hirai et al., 2015).
Также стоит отметить, что синергия мышц, полученная в результате нашего подхода, состоит только из сумм AA (см. Уравнения 9a – c). Эта формулировка означает, что мышечные синергии сами по себе не являются двигательными примитивами, а являются следствием модуляции механического импеданса, который может быть одним из моторных примитивов. Мы полагаем, что наши открытия согласуются с идеей динамических примитивов, которую недавно утверждали Хоган и Стернад (Hogan and Sternad, 2012).Тем не менее, синергия мышц может играть роль функциональных модулей — то есть системы отсчета в мышечном пространстве. Синергия мышц, представленная как баланс механического сопротивления, может быть названа «кинетической синергетикой». Таким образом, наше исследование классифицируется как подход, основанный на физике, и явно отличается от большинства исследований, которые относятся к категории статистических подходов (d’Avella et al., 2006; Cheung et al., 2009, 2012; Dominici et al. ., 2011; Bizzi, Cheung, 2013; Roh et al., 2013) для получения синергии мышц.Хотя в этой статье мы не обсуждаем нулевую синергию, идея нулевой синергии, которую статистический подход не может извлечь из данных, является информативной. Подход, основанный на физике, представляет собой мощный способ реконструировать механизм управления, лежащий в основе нейромышечно-скелетной системы в динамической среде. Для получения более подробной информации о мышечном синергизме, основанном на концепции АА, обратитесь также к нашим недавним публикациям (Koba et al., 2014; Oku et al., 2014, 2015; Uno et al., 2014).
Синергия мышц, жесткость конечных точек и виртуальные траектории в моторной адаптации
Как синергия мышц или баланс механического сопротивления влияют на развитие моторики, если они представляют собой систему отсчета в мышечном пространстве? Мы измерили сходство векторов мышечной синергии между субъектами до и после произвольной тренировки на основании значения IP соответствующих двух векторов мышечной синергии (таблица 3).Результаты показали, что мышечная синергия до и после тренировки демонстрировала сходные закономерности как в отношении индивидуальных, так и индивидуальных вариаций. Также примечательно, что синергия мышц оставалась почти постоянной, несмотря на то, что рассчитывалась на основе изменяющихся во времени сумм AA. Стандартные значения мышечной синергии были достаточно малы для всех испытуемых (рисунок 4, таблица 2). Эти результаты демонстрируют инвариантные кинетические характеристики, которые ЦНС может использовать для планирования движения.
Математически очевидно, что синергия мышц представляет собой основы полярных координат. Результаты показывают, что инвариантная система отсчета для моторного представления кодируется в изменяющиеся во времени биологические сигналы (рис. 3) и что система отсчета не только обычна среди нормальных субъектов, но и не зависит от уровня обучения. Таким образом, мы предполагаем, что мышечные синергии могут быть функциональными модулями, связывающими мышечное пространство с пространством задач, и что они могут быть системой координат для управления моторикой.Более того, неизменность мышечной синергии может быть связана со стабильными характеристиками конечной жесткости, поскольку мышечная синергия представляет собой баланс механического сопротивления за счет совместной активации мышц AA. В нашей задаче форма и ориентация эллипса конечной жесткости не сильно менялись во время обучения; однако его размер изменился (рис. 5). Ориентация большой оси эллипса имела тенденцию к сохранению наклона в направлении, соединяющем плечо и конечную точку (т.е.е., радиальное направление). Это указывает на то, что конечная жесткость в тангенциальном направлении всегда имеет тенденцию быть намного меньше, чем в радиальном направлении.
В отличие от этих жестко запрограммированных характеристик в ЦНС, виртуальные траектории резко изменились с увеличением моторики. Виртуальные траектории были организованы из неупорядоченных узоров в гладкие спиральные узоры, которые вращались в направлении, противоположном фактическим траекториям (рис. 6). Как показано на рисунке 7, в обоих случаях до и после тренировки виртуальные траектории демонстрировали колебательные движения, которые предшествовали реальным траекториям с аналогичными последовательностями, показывающими постепенно уменьшающиеся амплитуды.Однако разные фазовые отношения между фактическими и виртуальными траекториями проявились в каждом направлении после тренировки. В радиальном направлении высокая жесткость конечной точки вызвала движение конечной точки EP с фазовым сдвигом около 0 °. В тангенциальном направлении гораздо меньшая жесткость конечной точки вызвала движение конечной точки EP с фазовым сдвигом примерно на 180 °. Связь этих направленных механических импедансов привела к противоречивому наблюдению, т. Е. К противоположному вращению виртуальных траекторий.Это явление можно наблюдать при быстрых движениях. Это открытие указывает на то, что ЦНС требуется внутренняя модель (Gomi and Kawato, 1997) для достижения динамической компенсации в процессе моторного контроля и обучения.
Синергия мышц, жесткость конечных точек и виртуальные траектории при восстановлении моторики
В отличие от наших результатов из эксперимента 1, значительные изменения (IP <0,9) наблюдались в мышечной синергии у пациентов, перенесших инсульт, до и после реабилитации (таблица 5).Это наблюдение относится к нарушенной межсуставной координации, обычно наблюдаемой при движениях рук после инсульта. На наш взгляд, изменение мышечной синергии указывает на нарушение основы моторного контроля и может влиять на систему отсчета, необходимую для сенсомоторной трансформации. В случае пациента, перенесшего инсульт, аномальная совместная активация двухсуставных АА-мышц (зеленые столбцы на рисунке 9) привела к различным синергическим эффектам мышц, особенно в тангенциальном направлении. Значения SD аномальной мышечной синергии были тогда в пределах допустимого (малого) уровня, и, таким образом, аномальная мышечная синергия также могла рассматриваться как инвариантная основа для полярных координат.Другими словами, система отсчета в мышечном пространстве поддерживалась другими скоординированными мышцами.
До реабилитации субъект, перенесший инсульт, мог использовать моторную избыточность для регулирования нескольких мышц, чтобы управлять своими нарушениями после неврологической травмы, и поэтому он, возможно, достиг инвариантной координации, отличной от таковой у нормальных субъектов. Поскольку мышечная синергия представляла собой баланс механического сопротивления за счет совместной активации мышц AA, изменения мышечной синергии значительно повлияли на характеристики конечной точки жесткости.Эллипс конечной точки жесткости пациента после инсульта до реабилитации был удлинен, а ориентация его большой оси указала на большее вращение по часовой стрелке, чем у здорового пациента. Основная причина могла быть в гипертонусе двусуставных мышц; увеличение совместной активации двухсуставных мышц ( s se ) имеет тенденцию изменять собственные значения и собственные векторы матрицы жесткости суставов K j ( s ), увеличивая эллипса жесткости и вращая его большую ось по часовой стрелке.Эти характеристики эллипса конечной точки жесткости могут объяснить типичные дисфункции: синергию сгибателей (характеризующуюся одновременным отведением плеча и сгибанием локтя) и синергией разгибателей (характеризующуюся одновременным приведением плеча и разгибанием локтя) (Brunnstrom, 1970). Более того, изменение мышечной синергии приводит к значительному искажению не только жесткости конечных точек, но и сопутствующих виртуальных траекторий. Виртуальная траектория перемещалась в ограниченном диапазоне и имела тенденцию двигаться в фиксированном направлении малой оси эллипса конечной жесткости.
Однако реабилитация вызвала фундаментальные изменения в двигательном контроле у пациента, перенесшего инсульт. Мышечная синергия после реабилитации показала те же модели (IP> 0,9), что и у здорового субъекта (таблица 5). Этот результат указывает на то, что субъект, перенесший инсульт, восстановил нормальную структуру мышечной синергии в процессе восстановления. Более того, эти паттерны были аналогичны паттернам, извлеченным из испытуемых во время задачи быстрого поиска по спирали (IP> 0,9).Это тематическое исследование предоставляет только предварительные доказательства общей синергии мышц при выполнении различных задач, разных предметов и различных двигательных навыков испытуемых. Конечная жесткость также восстановилась, наряду с восстановлением соответствующей мышечной синергии. Форма эллипса конечной жесткости была укорочена, а ориентация большой оси слегка повернута против часовой стрелки. Эти результаты свидетельствуют о том, что пациент, перенесший инсульт, выздоравливал.Этот анализ был основан на данных после 2,5 месяцев реабилитации, и предполагается, что у пациента, перенесшего инсульт, есть потенциал для восстановления двигательной функции при дальнейшей реабилитации. Интересно, что в процессе восстановления мышечная синергия вернула нормальные паттерны раньше, чем виртуальные траектории. Виртуальная траектория полностью не восстановилась после 2,5 месяцев реабилитации. Это указывает на то, что синергия мышц, играющая роль системы отсчета в мышечном пространстве, имеет фундаментальное значение для моторного контроля.Это разумный вывод, потому что виртуальные траектории определяются конфигурационным пространством мышечных синергий.
Будущие направления реабилитации электродвигателей
Нарушение координации внутри конечностей — одна из причин двигательных нарушений. Если наша гипотеза верна, то при выборе методов реабилитации следует тщательно учитывать синергию мышц (т. Е. Баланс механического сопротивления). Важность контроля импеданса обсуждалась часто, но при его применении требуется осторожность, потому что контроль импеданса может привести либо к улучшению, либо к ухудшению результатов в зависимости от способа его использования.Мышечная синергия может быть показателем для изучения соответствующего вспомогательного применения контроля импеданса. Это также станет дополнительной мерой к клинической оценке, такой как оценка Фугля-Мейера и другие. Опять же, наша гипотеза состоит в том, что синергия мышц, баланс механического сопротивления представляют собой систему отсчета в мышечном пространстве. Это исследование проверило нашу гипотезу, чтобы подтвердить возможность практического использования мышечной синергии, например, при оценке, диагностике и планировании вмешательства для реабилитации после инсульта.
Результаты этого исследования можно резюмировать следующим образом: (1) синергия мышц — это неизменный баланс механического сопротивления мышц; (2) мышечная синергия представляет собой систему отсчета в мышечном пространстве; и (3) общие мышечные синергии были обнаружены среди различных задач (быстрое рисование спирали с не доминирующей рукой и медленное рисование круга с доминирующей рукой), разных испытуемых из разных поколений (т. е. от испытуемых в возрасте своего возраста). От 20 до 70 лет) и разные уровни двигательных навыков (начинающий, опытный и у пациента после реабилитации).Дальнейший сбор и анализ данных из различных ситуаций укрепят нашу гипотезу; Было бы полезно обсудить отношения с другими внутренними репрезентациями, такими как системы отсчета, центрированные на глазах, головы и мира. Наша будущая работа включает разработку новых подходов к роботизированной терапии, особенно для нижних конечностей. Робототерапия, особенно для функции нижних конечностей, в настоящее время находится на ранней стадии развития. Следующее поколение роботизированной нейрореабилитации требует правильной оценки эффекта вмешательства и сбора клинических данных для разработки эффективного вмешательства.Реабилитация после инсульта требует сенсомоторной координации. Комбинируя методы оценки синергии и роботизированной терапии , мы разработаем новое роботизированное вмешательство, протестируем и подтвердим его в рамках мышечной синергии.
В заключение, это исследование показало доказательства того, что мышечная синергия играет центральную роль в моторном представлении и формировании внутренней модели. Синергия мышц — это не примитивы, а функциональные модули механического сопротивления.Баланс механического сопротивления мышц необходим для управления моторикой, обучения и восстановления.
Заявление о конфликте интересов
Авторы заявляют, что исследование проводилось в отсутствие каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Благодарности
Мы хотели бы поблагодарить докторов наук. Невиллу Хогану и Дагмар Стернад за ценные комментарии к нашему исследованию. Эта работа была поддержана грантом JSPS для научных исследований (KAKENHI), номера грантов 24360096 и 15H03949.HK был частично поддержан грантом NIH R01HD069776-03.
Список литературы
Арига Ю., Фам Х., Уэмура М., Хираи Х. и Миядзаки Ф. (2012). «Новый контроль точки равновесия системы агонист-антагонист с помощью пневматических искусственных мышц», в IEEE Int. Конф. Робот. Автомат. (ICRA2012) . (Сент-Пол: IEEE), 1470–1475.
Google Scholar
Бернштейн, Н. (1967). Координация и регулирование движений .Оксфорд: Pergamon Press.
Google Scholar
Бицци, Э., Аккорнеро, Н., Чаппл, В., и Хоган, Н. (1984). Контроль осанки и формирование траектории движения рук. J. Neurosci. 4, 2738–2744.
PubMed Аннотация | Google Scholar
Бицци, Э., и Чунг, В. К. К. (2013). Нервное происхождение мышечной синергии. Фронт. Comput. Neurosci. 7:51. DOI: 10.3389 / fncom.2013.00051
CrossRef Полный текст | Google Scholar
Бруннстрем, С.(1970). Движение терапии гемиплегии: нейрофизиологический подход . Нью-Йорк, штат Нью-Йорк: Харпер и Роу.
Google Scholar
Карр Дж. И Шеперд Р. Б. (2010). Неврологическая реабилитация . Лондон: Черчилль Ливингстон.
Google Scholar
Чунг, В. К., Пирон, Л., Агостини, М., Сильвони, С., Туролла, А., и Бицци, Е. (2009). Устойчивость мышечного синергизма к произвольным действиям после коркового инсульта у человека. Proc. Natl. Акад. Sci. США 106, 19563–19568. DOI: 10.1073 / pnas.04106
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Cheung, V.C.K, Turolla, A., Agostini, M., Silvoni, S., Bemmis, C., Kasi, P., et al. (2012). Паттерны мышечной синергии как физиологические маркеры моторного коркового повреждения. Proc. Natl. Акад. Sci. США 109, 14652–14656. DOI: 10.1073 / pnas.1212056109
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Крисвелл, Э.(2010). Введение Крэма в поверхностную электромиографию , 2-е изд. Садбери: издательство «Джонс и Бартлетт».
Google Scholar
d’Avella, A., Portone, A., Fernandez, L., and Lacquaniti, F. (2006). Контроль быстродействующих движений с помощью комбинаций мышечной синергии. J. Neurosci. 26, 7791–7810. DOI: 10.1523 / JNEUROSCI.0830-06.2006
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Dominici, N., Иваненко, Ю.П., Каппеллини, Г., д’Авелла, А., Монди, В., Чичезе, М., и др. (2011). Двигательные примитивы у новорожденных и их развитие. Science 334, 997–999. DOI: 10.1126 / science.1210617
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Фельдман А.Г. (1966). Функциональная настройка нервной системы с контролем движений или поддержанием устойчивой позы. II. Контролируемые параметры мышцы. Биофизика 11, 565–578.
Google Scholar
Фельдман А.Г. (1986). Еще раз о гипотезе точки равновесия (λ-модель) для управления двигателем. J. Mot. Behav. 18, 17–54. DOI: 10.1080 / 00222895.1986.10735369
CrossRef Полный текст | Google Scholar
Фельдман, А.Г., Адамович, С.В., Остри, Д. Дж., И Фланаган, Дж. Р. (1990). «Происхождение электромиограмм — объяснения, основанные на гипотезе точки равновесия», в Multiple Muscle Systems , eds J.М. Винтерс и С. Л-Й. Ву (Нью-Йорк, штат Нью-Йорк: Springer), 195–213.
Google Scholar
Фельдман, А.Г., и Латаш, М.Л. (2005). Проверка гипотез и развитие науки: недавние попытки опровергнуть гипотезу точки равновесия. Exp. Brain Res. 161, 91–103. DOI: 10.1007 / s00221-004-2049-0
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Флэш, Т., и Хоган, Н. (1985). Координация движений рук: экспериментально подтвержденная математическая модель. J. Neurosci. 5, 1688–1703.
PubMed Аннотация | Google Scholar
Грейнджер, К. В., Гамильтон, Б. Б., Кейт, Р. А., Зилезни, М., и Шервин, Ф. С. (1986). Достижения в функциональной оценке для медицинской реабилитации. Верх. Гериатр. Rehabil. 1, 59–74. DOI: 10.1097 / 00013614-198604000-00007
CrossRef Полный текст | Google Scholar
Хираи, Х., Фам, Х., Арига, Ю., Уно, К., и Миядзаки, Ф. (2015).»Глава. 2: моторный контроль, основанный на гипотезе мышечной синергии », в Когнитивная неврология Робототехника: синтетические подходы к человеческому пониманию, том I: синтетические подходы, часть I (Springer).
Google Scholar
Хислоп Х. и Монтгомери Дж. (2007). Тестирование мышц Дэниэлса и Уортингема: методы ручного обследования , 8-е изд. Сент-Луис: W.B. Компания Сондерс.
Google Scholar
Хоган, Н.(1984). Адаптивный контроль механического сопротивления путем коактивации мышц-агонистов. IEEE Trans. Автомат. Contr. 29, 681–690. DOI: 10.1109 / TAC.1984.1103644
CrossRef Полный текст | Google Scholar
Хоган, Н., Стернад, Д. (2012). Динамические примитивы двигательного поведения. Biol. Киберн. 106, 727–739. DOI: 10.1007 / s00422-012-0527-1
CrossRef Полный текст | Google Scholar
Кандел, Э., Шварц, Дж., Джесселл, Т., Сигельбаум, С.А., и Хадспет, А.Дж. (2012). Принципы нейронологии , 5-е изд. Нью-Йорк: McGraw-Hill Professional.
Google Scholar
Коба К., Мураками К., Оку Т., Уно К., Пхативуттипат П., Ямасита Ю. и др. (2014). «Неявное представление мышечной активности во время тренировки координации: анализ мышечной синергии для визуализации моторного усиления в виртуальной траектории движения многосуставной руки», в 5th IEEE RAS & EMBS Int.Конф. Биомед. Роб. Биомехатрон. (БиоРоб 2014) . (Сан-Паулу: IEEE), 270–275.
Google Scholar
Lacquaniti, F., Terzuolo, C., and Viviani, P. (1983). Закон, связывающий кинематический и образный аспекты движений рисования. Acta Psychol. 54, 115–130. DOI: 10.1016 / 0001-6918 (83) -6
CrossRef Полный текст | Google Scholar
Латаш, М. Л. (2008). Синергия . Нью-Йорк: Издательство Оксфордского университета.
Google Scholar
Лестьен Ф., Полит А. и Бицци Э. (1981). Функциональная организация двигательного процесса, лежащего в основе перехода от движения к позе. Brain Res. 230, 121–131. DOI: 10.1016 / 0006-8993 (81) -6
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Что такое антагонистические мышцы? (с иллюстрациями)
Мышцы-антагонисты — это мышцы, которые работают в противовес друг другу. Например, человек использует определенные группы мышц, чтобы разжать руку и широко развести пальцы.Однако для того, чтобы сжать руку и сжать кулак, необходимо задействовать антагонистический набор мышц. Эти мышцы важны для баланса, разгибания конечностей, удерживания предметов в воздухе и сокращения конечностей, среди прочего.
Одна пара антагонистических мышц — это бицепс и трицепс.В теле много групп мышц-антагонистов. Самая известная из этих пар — бицепс и трицепс на руке. Дополнительные наборы включают мышцы груди и задней части туловища, а также четырехглавую мышцу и подколенные сухожилия ноги.
Антагонистические мышцы необходимы для равновесия, а также для разгибания и сокращения конечностей.Эти мышцы необходимы для правильного функционирования тела. Скелетные мышцы могут только напрягаться или сокращаться; в некотором смысле их можно сравнить с веревкой, обвязанной вокруг камня, которую можно туго натянуть только в одном направлении или позволить ослабить. Чтобы часть тела двигалась в противоположном направлении, необходимо задействовать противоположную группу мышц.Возвращаясь к метафоре камня, нужно привязать еще одну веревку к противоположной стороне камня и туго натянуть, если объект нужно переместить в противоположном направлении.
Анатомическая иллюстрация, показывающая множество мышц верхней части тела, включая мышцы-антагонисты и агонисты.Упражнения на динамическое напряжение, подобные известным Чарльзу Атласу, иногда используют антагонистические группы мышц. В одном упражнении руки сцеплены перед грудью, и обе руки упираются друг в друга. Медленно рукам позволяют двигаться влево, затем медленно вправо. Это упражнение прорабатывает группы мышц, но в любой момент времени на противоположных руках.
Тяжелоатлеты часто спорят о том, как лучше тренировать мышцы-антагонисты.Тяжелоатлеты часто спорят о том, как лучше тренировать такие группы мышц. Некоторые считают, что эти мышцы следует прорабатывать в один и тот же день, чтобы добиться значительных результатов за ограниченное время. Другие тяжелоатлеты верят, что простое выполнение упражнений медленно проработает обе мышцы антагонистической группы; выполнение различных упражнений, которые индивидуально нацелены на обе мышцы в группе, приведет к перетренированности. Тяжелоатлеты обеих философских школ хорошо выступили на соревнованиях, поэтому вопрос остается открытым.
Группы мышц-антагонистов включают мышцы груди.Как накачать мышцы с помощью антагонистических тренировок
Закрыть объявление × Логотип Muscle & Fitness- Тренировки
- Программы тренировок
- Советы по тренировкам
- Фитнес
- Тренировки для спортсменов / знаменитостей
- Видео с упражнениями
Поиск упражнений с таргетингом…- Упражнения для пресса и кора
- Упражнения для рук
- Упражнения для спины
- Упражнения на грудь
- Упражнения для ног
- Упражнения для плеч
- Питание
- Здоровое питание
- Терять жир
- Прирост массы
- Дополнения
- Performance Nutrition
Производительное питание
Здоровое питание Как сахар может помочь во время тренировок
Здоровое питание При поддержке: почему читмилы важны для похудания
Здоровое питание Лучшие костные бульоны для общего здоровья
- Спортсмены и знаменитости
- Новости
- Интервью
- Женщины
- Советы профессионалов
- за кадром
- Видео
Новости Ролли Винклаар выбывает из 2020 Mr.Олимпия
Новости Новое исследование подтверждает, что худеть никогда не поздно
Интервью Пэт Макафи тренируется, чтобы стать лидером WWE
Новости Как Сара Апгар и FitFighter меняют фитнес
- Характеристики
- Активный образ жизни
- Шестерня
- Новости
- Мнение
Шестерни Путеводитель по праздничным подаркам M&F 2020
Особенности Полное руководство по уходу за кожей для мужчин
Новости Что другие виды спорта могут извлечь из пузыря НБА
Новости РС.Олимпия возвращается: возрождение традиций
- Flex
- Olympia
- Питание
- Обучение
- Видео
IFBB Победители Олимпии-2020
Новости 3 способа прямой трансляции уик-энда Олимпии-2020
IFBB Джордж Петерсон — 212 бодибилдинг — Олимпия 2020
IFBB Дерек Лансфорд — 212 бодибилдинг — Олимпия 2020
- Ее
- Тренировки
- Питание
- Дополнения
- Спортсмены и знаменитости
- Характеристики
Ее тренировки Силовая тренировка всего тела в домашних условиях
Советы профессионалов Советы по дыханию от тренера Холли Берри
Ее питание Кофе связан с лишним жиром у женщин
Ее тренировки 7 растяжек для лучшей тренировки
- Олимпия
- Олимпия
- Купить билеты
IFBB Победители Олимпии-2020
IFBB Отчет о финале Олимпии 2019
IFBB Звезды посещают стенд Muscle & Fitness
IFBB Открытый отчет по бодибилдингу на Олимпию 2019
Подпишитесь на YouTube
Подпишитесь на рассылку новостей
Условия эксплуатации
политика конфиденциальности
Политика использования файлов cookie
Заявление о доступности Управление файлами cookie- Тренировки
- Программы тренировок
- Советы по тренировкам
- Фитнес
- Тренировки для спортсменов / знаменитостей
- Видео с упражнениями
- Питание
- Здоровое питание
- Терять жир
- Прирост массы
- Дополнения
- Performance Nutrition
- Спортсмены и знаменитости
- Новости
- Интервью
- Женщины
- Советы профессионалов
- за кадром
- Видео
- Особенности
- Активный образ жизни
- Шестерня
- Новости
- Мнение
- Flex
- Олимпия
- Питание
- Обучение
- Видео
- Ее
- Тренировки
- Питание
- Дополнения
- Спортсмены и знаменитости
- Характеристики
- Олимпия
- Олимпия
- Купить билеты
- Ресурсы и основные моменты
- Темы
- Видео
- Подкасты
- Контакт
- Условия использования
- Политика конфиденциальности
- Политика в отношении файлов cookie
Заявление о доступности- Управление файлами cookie
Оставайтесь на связи
- Программы тренировок
- Советы по тренировкам
- Фитнес
- Тренировки для спортсменов / знаменитостей
- Видео с упражнениями
- Упражнения для пресса и кора
- Упражнения для рук
- Упражнения для спины
- Упражнения на грудь
- Упражнения для ног
- Упражнения для плеч
- Здоровое питание
- Терять жир
- Прирост массы
- Дополнения
- Performance Nutrition
Производительное питание
Здоровое питаниеКак сахар может помочь во время тренировок
Здоровое питаниеПри поддержке: почему читмилы важны для похудания
Здоровое питаниеЛучшие костные бульоны для общего здоровья
- Новости
- Интервью
- Женщины
- Советы профессионалов
- за кадром
- Видео
Ролли Винклаар выбывает из 2020 Mr.Олимпия
НовостиНовое исследование подтверждает, что худеть никогда не поздно
ИнтервьюПэт Макафи тренируется, чтобы стать лидером WWE
НовостиКак Сара Апгар и FitFighter меняют фитнес
- Активный образ жизни
- Шестерня
- Новости
- Мнение
Путеводитель по праздничным подаркам M&F 2020
ОсобенностиПолное руководство по уходу за кожей для мужчин
НовостиЧто другие виды спорта могут извлечь из пузыря НБА
НовостиРС.Олимпия возвращается: возрождение традиций
- Olympia
- Питание
- Обучение
- Видео
Победители Олимпии-2020
Новости3 способа прямой трансляции уик-энда Олимпии-2020
IFBBДжордж Петерсон — 212 бодибилдинг — Олимпия 2020
IFBBДерек Лансфорд — 212 бодибилдинг — Олимпия 2020
- Тренировки
- Питание
- Дополнения
- Спортсмены и знаменитости
- Характеристики
Силовая тренировка всего тела в домашних условиях
Советы профессионаловСоветы по дыханию от тренера Холли Берри
Ее питаниеКофе связан с лишним жиром у женщин
Ее тренировки7 растяжек для лучшей тренировки
- Олимпия
- Купить билеты
Победители Олимпии-2020
IFBBОтчет о финале Олимпии 2019
IFBBЗвезды посещают стенд Muscle & Fitness
IFBBОткрытый отчет по бодибилдингу на Олимпию 2019
- Программы тренировок
- Советы по тренировкам
- Фитнес
- Тренировки для спортсменов / знаменитостей
- Видео с упражнениями
- Здоровое питание
- Терять жир
- Прирост массы
- Дополнения
- Performance Nutrition
- Новости
- Интервью
- Женщины
- Советы профессионалов
- за кадром
- Видео
- Активный образ жизни
- Шестерня
- Новости
- Мнение
- Олимпия
- Питание
- Обучение
- Видео
- Тренировки
- Питание
- Дополнения
- Спортсмены и знаменитости
- Характеристики
- Олимпия
- Купить билеты
- Темы
- Видео
- Подкасты
- Контакт
- Условия использования
- Политика конфиденциальности
- Политика в отношении файлов cookie Заявление о доступности
- Управление файлами cookie
Мышцы в движении
Мышцы постоянно активны.Как специалисту в области здоровья и фитнеса, важно понимать действия, которые выполняют мышцы. Когда мышцы сокращаются, они варьируются от длины покоя (то есть укорачиваются или удлиняются) или остаются прежними. Три действия мышц: концентрическое, эксцентрическое и изометрическое. Их имена указывают на их длину.
Концентрический ход
Мышца активно укорачивается при напряжении. Например, квадрицепсы укорачиваются в восходящей фазе разгибания ног.
Эксцентриковый ход
Мышца активно удлиняется при напряжении или возвращается в положение покоя из укороченного положения.Например, двуглавая мышца плеча удлиняется в фазе опускания во время сгибания бицепса, возвращая руку в исходное положение.
Изометрический экшн
При сокращении мышцы нет видимого изменения длины. Планка — это пример того, как многие основные группы мышц выполняют изометрические сокращения.
Роли и обязанности мышц при движении различаются. В движении мышцы берут на себя роль агониста, антагониста, синергиста или соконтрактора.
Агонист
- Основные мышцы или группы мышц, ответственные за конкретное движение или действие
- Также называется тягач
- Например, трехглавая мышца плеча — это основная мышца, отвечающая за движение во время разгибания трицепса.
Антагонист
- Движение против агониста или противодействие ему
- Во время сгибания бицепса противоположная группа мышц — антагонист — это трицепс.
Синергист
- Помогает агонисту в выполнении его действия
- Стабилизирует и нейтрализует вращение сустава (предотвращает вращение сустава во время движения)
- Становится активным при увеличении внешней силы или когда агонист утомляется
- Во время сгибания двуглавой мышцы синергистами являются двуглавая мышца плеча и плечевая мышца, так как плечевая мышца действует как агонист.Первые два помогают последнему стабилизировать локтевой сустав во время упражнения на сгибание бицепса.
Совместное сжатие
- Агонист и антагонист одновременно действуют для стабилизации сустава
- Совместно сокращающиеся мышцы являются «стабилизаторами», которые защищают сустав и помогают поддерживать выравнивание.
- Например, при фиксации живота мышцы кора — поперечные мышцы живота и мутифиди — и мышцы тазового дна сокращаются вместе, чтобы поддерживать выравнивание позы во время упражнений.
синергистов (вниз) и антагонистов (Поперек) | |
Гленогумерол Шарнир (шаровидный) | |
Сгибание | добавочный номер |
|
|
Горизонтальное отведение | Горизонтальное приведение |
|
|
Похищение | Аддукция |
|
|
Среднее вращение | Боковое вращение |
|
|
Перейти: вверх |
Гленогумероловый сустав (шаровидная головка) |
Scapulothoracis Joint | Локоть —
Humeroulnar Joint (шарнир) | Радиоульнар (предплечье) |
Лучезапястный сустав (запястье) | Рука и
Пальцы (пястно-фаланговые, проксимальные и дистальные межфаланговые суставы) |
Большой палец (запястно-пястный, пястно-фаланговый, межфаланговый)
Суставы) | Оппозиция: Opponens Pollicis |
Позвоночный столб | Шейного отдела позвоночника
| Нижняя челюсть — (височно-нижнечелюстной сустав — ВНЧС) |
Ребра | Бедро (тазобедренный сустав) — (мяч и
Розетка) | Колено (тибио-бедренный сустав) |
Голеностопный сустав (голеностопный сустав) | Стопа и пальцы ног (предплюсневая,
Плюснефаланговые, межфаланговые суставы)Лопаточно-грудной сустав | |
Высота | Депрессия |
|
|
Похищение | Аддукция |
|
|
Вращение вверх | Вращение вниз |
|
|
Перейти: вверх |
Гленогумероловый сустав (шаровидная головка) |
Scapulothoracis Joint | Локоть —
Humeroulnar Joint (шарнир) | Радиоульнар (предплечье) |
Лучезапястный сустав (запястье) | Рука и
Пальцы (пястно-фаланговые, проксимальные и дистальные межфаланговые суставы) |
Большой палец (запястно-пястный, пястно-фаланговый, межфаланговый)
Суставы) | Оппозиция: Opponens Pollicis |
Позвоночный столб | Шейного отдела позвоночника
| Нижняя челюсть — (височно-нижнечелюстной сустав — ВНЧС) |
Ребра | Бедро (тазобедренный сустав) — (мяч и
Розетка) | Колено (тибио-бедренный сустав) |
Голеностопный сустав (голеностопный сустав) | Стопа и пальцы ног (предплюсневая,
Плюснефаланговые, межфаланговые суставы)Локоть — Humeroulnar Шарнир (шарнир) | |
Сгибание | добавочный номер |
|
|
Перейти: вверх |
Гленогумероловый сустав (шаровидная головка) |
Scapulothoracis Joint | Локоть —
Humeroulnar Joint (шарнир) | Радиоульнар (предплечье) |
Лучезапястный сустав (запястье) | Рука и
Пальцы (пястно-фаланговые, проксимальные и дистальные межфаланговые суставы) |
Большой палец (запястно-пястный, пястно-фаланговый, межфаланговый)
Суставы) | Оппозиция: Opponens Pollicis |
Позвоночный столб | Шейного отдела позвоночника
| Нижняя челюсть — (височно-нижнечелюстной сустав — ВНЧС) |
Ребра | Бедро (тазобедренный сустав) — (мяч и
Розетка) | Колено (тибио-бедренный сустав) |
Голеностопный сустав (голеностопный сустав) | Стопы и пальцы ног (предплюсневая,
Плюсно-фаланговые, межфаланговые суставы)Радиоульнар (Предплечье) | |
Супинация | Пронация |
|
|
Перейти: вверх |
Гленогумероловый сустав (шаровидная головка) |
Scapulothoracis Joint | Локоть —
Humeroulnar Joint (шарнир) | Радиоульнар (предплечье) |
Лучезапястный сустав (запястье) | Рука и
Пальцы (пястно-фаланговые, проксимальные и дистальные межфаланговые суставы) |
Большой палец (запястно-пястный, пястно-фаланговый, межфаланговый)
Суставы) | Оппозиция: Opponens Pollicis |
Позвоночный столб | Шейного отдела позвоночника
| Нижняя челюсть — (височно-нижнечелюстной сустав — ВНЧС) |
Ребра | Бедро (тазобедренный сустав) — (мяч и
Розетка) | Колено (тибио-бедренный сустав) |
Голеностопный сустав (голеностопный сустав) | Стопы и пальцы ног (предплюсневая,
Плюснефаланговые, межфаланговые суставы)Лучезапястный сустав (Запястье) | |
Сгибание | добавочный номер |
|
|
Похищение | Аддукция |
|
|
Перейти: вверх |
Гленогумероловый сустав (шаровидная головка) |
Scapulothoracis Joint | Локоть —
Humeroulnar Joint (шарнир) | Радиоульнар (предплечье) |
Лучезапястный сустав (запястье) | Рука и
Пальцы (пястно-фаланговые, проксимальные и дистальные межфаланговые суставы) |
Большой палец (запястно-пястный, пястно-фаланговый, межфаланговый)
Суставы) | Оппозиция: Opponens Pollicis |
Позвоночный столб | Шейного отдела позвоночника
| Нижняя челюсть — (височно-нижнечелюстной сустав — ВНЧС) |
Ребра | Бедро (тазобедренный сустав) — (мяч и
Розетка) | Колено (тибио-бедренный сустав) |
Голеностопный сустав (голеностопный сустав) | Стопы и пальцы ног (предплюсневая,
Плюсно-фаланговые, межфаланговые суставы)Рука и пальцы (пястно-фаланговая, Проксимальные и дистальные межфаланговые суставы) | |
Расширение со 2-го по 5-й пальцы | Сгибание со 2-го по 5-й пальцы |
| |
Перейти: вверх |
Гленогумероловый сустав (шаровидная головка) |
Scapulothoracis Joint | Локоть —
Humeroulnar Joint (шарнир) | Радиоульнар (предплечье) |
Лучезапястный сустав (запястье) | Рука и
Пальцы (пястно-фаланговые, проксимальные и дистальные межфаланговые суставы) |
Большой палец (запястно-пястный, пястно-фаланговый, межфаланговый)
Суставы) | Оппозиция: Opponens Pollicis |
Позвоночный столб | Шейного отдела позвоночника
| Нижняя челюсть — (височно-нижнечелюстной сустав — ВНЧС) |
Ребра | Бедро (тазобедренный сустав) — (мяч и
Розетка) | Колено (тибио-бедренный сустав) |
Голеностопный сустав (голеностопный сустав) | Стопа и пальцы ног (предплюсневая,
Плюсно-фаланговые, межфаланговые суставы)Большой палец (запястно-пястный, Пястно-фаланговые, межфаланговые суставы) | |
Сгибание | добавочный номер |
|
|
Похищение | Аддукция |
Перейти: вверх |
Гленогумероловый сустав (шаровидная головка) |
Scapulothoracis Joint | Локоть —
Humeroulnar Joint (шарнир) | Радиоульнар (предплечье) |
Лучезапястный сустав (запястье) | Рука и
Пальцы (пястно-фаланговые, проксимальные и дистальные межфаланговые суставы) |
Большой палец (запястно-пястный, пястно-фаланговый, межфаланговый)
Суставы) | Оппозиция: Opponens Pollicis |
Позвоночный столб | Шейного отдела позвоночника
| Нижняя челюсть — (височно-нижнечелюстной сустав — ВНЧС) |
Ребра | Бедро (тазобедренный сустав) — (мяч и
Розетка) | Колено (тибио-бедренный сустав) |
Голеностопный сустав (голеностопный сустав) | Стопа и пальцы ног (предплюсневая,
Плюснефаланговые, межфаланговые суставы)Оппозиция: Оппоненс ПоллисисПозвоночный столб | |
Сгибание | добавочный номер |
|
|
Вращение (Примечание: не антагонисты) | Боковое сгибание |
|
|
Перейти: вверх |
Гленогумероловый сустав (шаровидная головка) |
Scapulothoracis Joint | Локоть —
Humeroulnar Joint (шарнир) | Радиоульнар (предплечье) |
Лучезапястный сустав (запястье) | Рука и
Пальцы (пястно-фаланговые, проксимальные и дистальные межфаланговые суставы) |
Большой палец (запястно-пястный, пястно-фаланговый, межфаланговый)
Суставы) | Оппозиция: Opponens Pollicis |
Позвоночный столб | Шейного отдела позвоночника
| Нижняя челюсть — (височно-нижнечелюстной сустав — ВНЧС) |
Ребра | Бедро (тазобедренный сустав) — (мяч и
Розетка) | Колено (тибио-бедренный сустав) |
Голеностопный сустав (голеностопный сустав) | Стопы и пальцы ног (предплюсневая,
Плюснефаланговые, межфаланговые суставы)Шейный отдел позвоночника | |
Сгибание | добавочный номер |
|
|
Вращение (Примечание: не антагонисты) | Боковое сгибание |
|
|
Перейти: вверх |
Гленогумероловый сустав (шаровидная головка) |
Scapulothoracis Joint | Локоть —
Humeroulnar Joint (шарнир) | Радиоульнар (предплечье) |
Лучезапястный сустав (запястье) | Рука и
Пальцы (пястно-фаланговые, проксимальные и дистальные межфаланговые суставы) |
Большой палец (запястно-пястный, пястно-фаланговый, межфаланговый)
Суставы) | Оппозиция: Opponens Pollicis |
Позвоночный столб | Шейного отдела позвоночника
| Нижняя челюсть — (височно-нижнечелюстной сустав — ВНЧС) |
Ребра | Бедро (тазобедренный сустав) — (мяч и
Розетка) | Колено (тибио-бедренный сустав) |
Голеностопный сустав (голеностопный сустав) | Стопа и пальцы ног (предплюсневая,
Плюснефаланговые, межфаланговые суставы)Нижняя челюсть — височно-нижнечелюстная Сустав — ВНЧС) | |
Высота | Депрессия |
|
|
Вытягивание | Втягивание |
Перейти: вверх |
Гленогумероловый сустав (шаровидная головка) |
Scapulothoracis Joint | Локоть —
Humeroulnar Joint (шарнир) | Радиоульнар (предплечье) |
Лучезапястный сустав (запястье) | Рука и
Пальцы (пястно-фаланговые, проксимальные и дистальные межфаланговые суставы) |
Большой палец (запястно-пястный, пястно-фаланговый, межфаланговый)
Суставы) | Оппозиция: Opponens Pollicis |
Позвоночный столб | Шейного отдела позвоночника
| Нижняя челюсть — (височно-нижнечелюстной сустав — ВНЧС) |
Ребра | Бедро (тазобедренный сустав) — (мяч и
Розетка) | Колено (тибио-бедренный сустав) |
Голеностопный сустав (голеностопный сустав) | Стопа и пальцы ног (предплюсневая,
Плюснефаланговые, межфаланговые суставы)Ребра | |
Высота | Депрессия |
| |
Перейти: вверх |
Гленогумероловый сустав (шаровидная головка) |
Scapulothoracis Joint | Локоть —
Humeroulnar Joint (шарнир) | Радиоульнар (предплечье) |
Лучезапястный сустав (запястье) | Рука и
Пальцы (пястно-фаланговые, проксимальные и дистальные межфаланговые суставы) |
Большой палец (запястно-пястный, пястно-фаланговый, межфаланговый)
Суставы) | Оппозиция: Opponens Pollicis |
Позвоночный столб | Шейного отдела позвоночника
| Нижняя челюсть — (височно-нижнечелюстной сустав — ВНЧС) |
Ребра | Бедро (тазобедренный сустав) — (мяч и
Розетка) | Колено (тибио-бедренный сустав) |
Голеностопный сустав (голеностопный сустав) | Стопа и пальцы ног (предплюсневая,
Плюснефаланговые, межфаланговые суставы)Бедро — (тазобедренный сустав) — (Шарик и гнездо) | |
Сгибание | добавочный номер |
|
|
Среднее вращение | Боковое вращение |
|
|
Похищение | Аддукция |
|
|
Перейти: вверх |
Гленогумероловый сустав (шаровидная головка) |
Scapulothoracis Joint | Локоть —
Humeroulnar Joint (шарнир) | Радиоульнар (предплечье) |
Лучезапястный сустав (запястье) | Рука и
Пальцы (пястно-фаланговые, проксимальные и дистальные межфаланговые суставы) |
Большой палец (запястно-пястный, пястно-фаланговый, межфаланговый)
Суставы) | Оппозиция: Opponens Pollicis |
Позвоночный столб | Шейного отдела позвоночника
| Нижняя челюсть — (височно-нижнечелюстной сустав — ВНЧС) |
Ребра | Бедро (тазобедренный сустав) — (мяч и
Розетка) | Колено (тибио-бедренный сустав) |
Голеностопный сустав (голеностопный сустав) | Стопы и пальцы ног (предплюсневая,
Плюсно-фаланговые, межфаланговые суставы)Колено (тибиофеморальное Шарнир) | |
Сгибание | добавочный номер |
|
|
Медиальное вращение согнутого колена | Боковое вращение согнутого колена |
| |
Перейти: вверх |
Гленогумероловый сустав (шаровидный) |
Scapulothoracis Joint | Локоть —
Плечевой сустав (шарнир) | Радиоульнар (предплечье) |
Лучезапястный сустав (запястье) | Рука и
Пальцы (пястно-фаланговые, проксимальные и дистальные межфаланговые суставы) |
Большой палец (запястно-пястный, пястно-фаланговый, межфаланговый)
Суставы) | Оппозиция: Opponens Pollicis |
Позвоночный столб | Шейного отдела позвоночника
| Нижняя челюсть — (височно-нижнечелюстной сустав — ВНЧС) |
Ребра | Бедро (тазобедренный сустав) — (мяч и
Розетка) | Колено (тибио-бедренный сустав) |
Голеностопный сустав (голеностопный сустав) | Стопа и пальцы ног (предплюсневая,
Плюсно-фаланговые, межфаланговые суставы)Голеностопный сустав (Talocrural Шарнир) | |
Подошвенное сгибание | Тыльное сгибание |
|
|
Перейти: вверх |
Гленогумероловый сустав (шаровидная головка) |
Scapulothoracis Joint | Локоть —
Humeroulnar Joint (шарнир) | Радиоульнар (предплечье) |
Лучезапястный сустав (запястье) | Рука и
Пальцы (пястно-фаланговые, проксимальные и дистальные межфаланговые суставы) |
Большой палец (запястно-пястный, пястно-фаланговый, межфаланговый)
Суставы) | Оппозиция: Opponens Pollicis |
Позвоночный столб | Шейного отдела позвоночника
| Нижняя челюсть — (височно-нижнечелюстной сустав — ВНЧС) |
Ребра | Бедро (тазобедренный сустав) — (мяч и
Розетка) | Колено (тибио-бедренный сустав) |
Голеностопный сустав (голеностопный сустав) | Стопа и пальцы ног (предплюсневая,
Плюсно-фаланговые, межфаланговые суставы)Стопа и пальцы ног (предплюсневая, Плюснефаланговые, межфаланговые суставы) | |
Инверсия | Eversion |
|
|
Сгибание — от 2-го до 5-го пальцев | Расширение — со 2-го по 5-й пальцы |
|
|
Сгибание первого пальца стопы | Расширение первого пальца стопы |
| |
Отведение первого пальца стопы | Отведение пятого пальца стопы |
